One other aspect of gears designers must consider is how they reverse motion: the driven gear spins in the opposite direction as the driving gear.
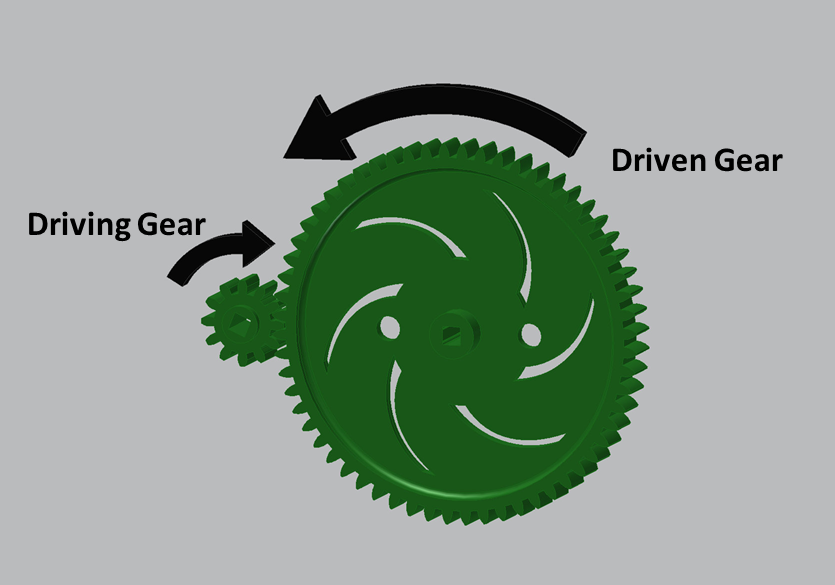
To make the output gear spin in the same direction as the input gear, some designers will use something called an idler gear.
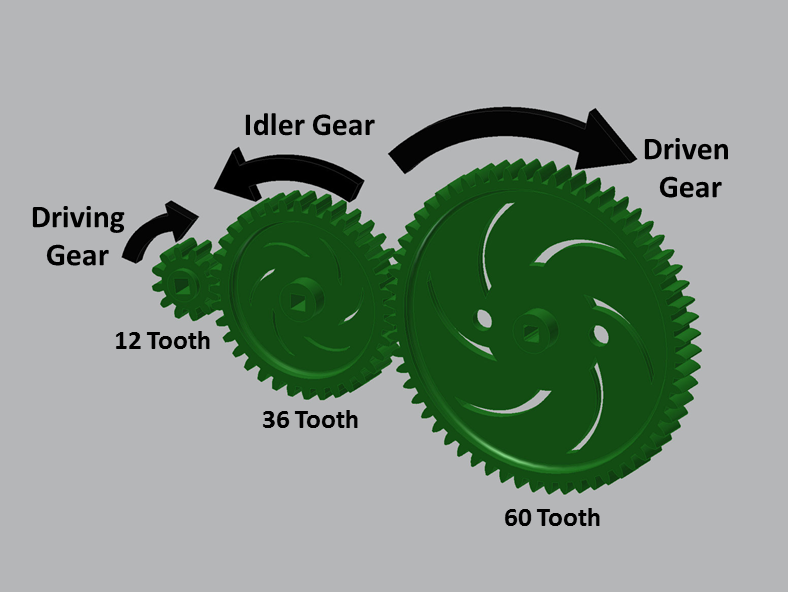
The idler gear has no effect on the overall reduction. In a previous example it was shown that a 12:60 ratio results in a gear reduction of 5. One can similarly calculate the gear reduction on the idler gear set in two stages.
Gear Reduction 1 = 36 / 12 = 3
Gear Reduction 2 = 60 / 36 = 1.667
Overall Gear Reduction = Gear Reduction 1 x Gear Reduction 2 = 3 x 1.667 = 5
The only gears that matter to reduction in a system like this are the first gear and the last gear.
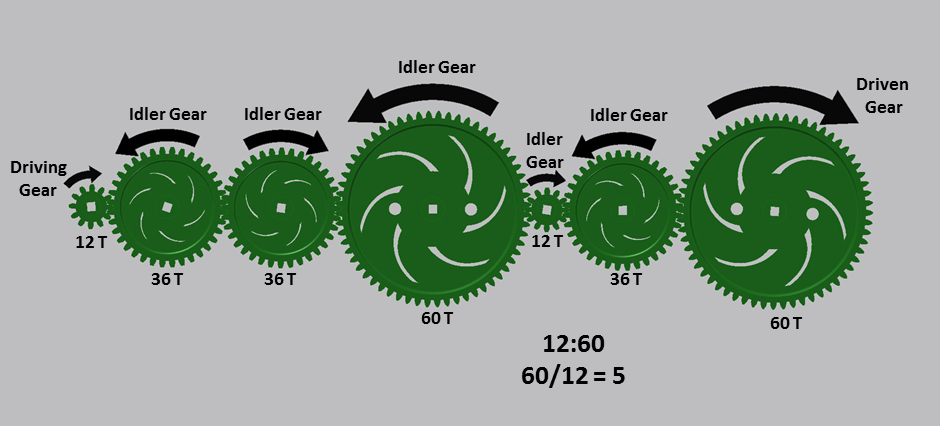
Idler gears can be very useful, especially for spanning long distances; the below example shows how they can be used in a competition robot drivetrain.
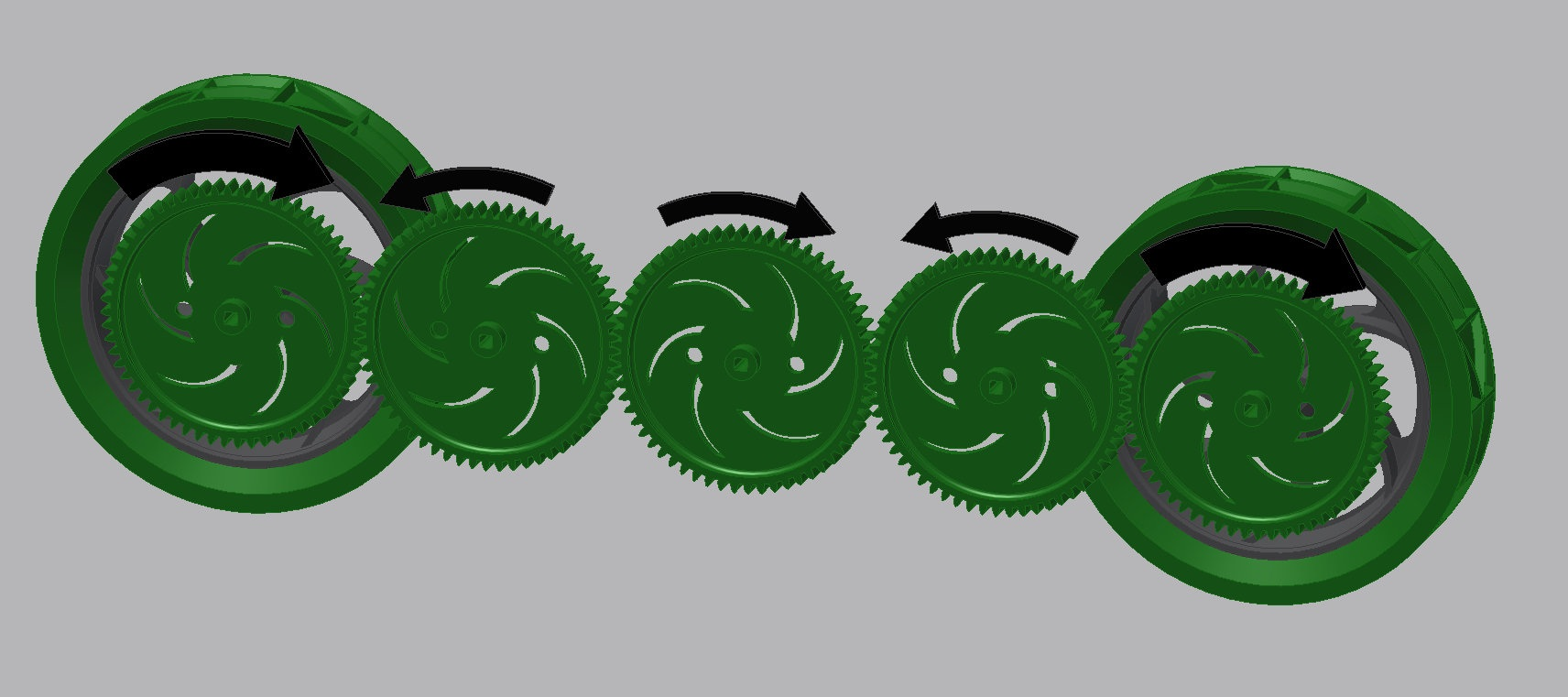
Note that if a designer uses the wrong number of idlers, the drivetrain won’t function quite as well:
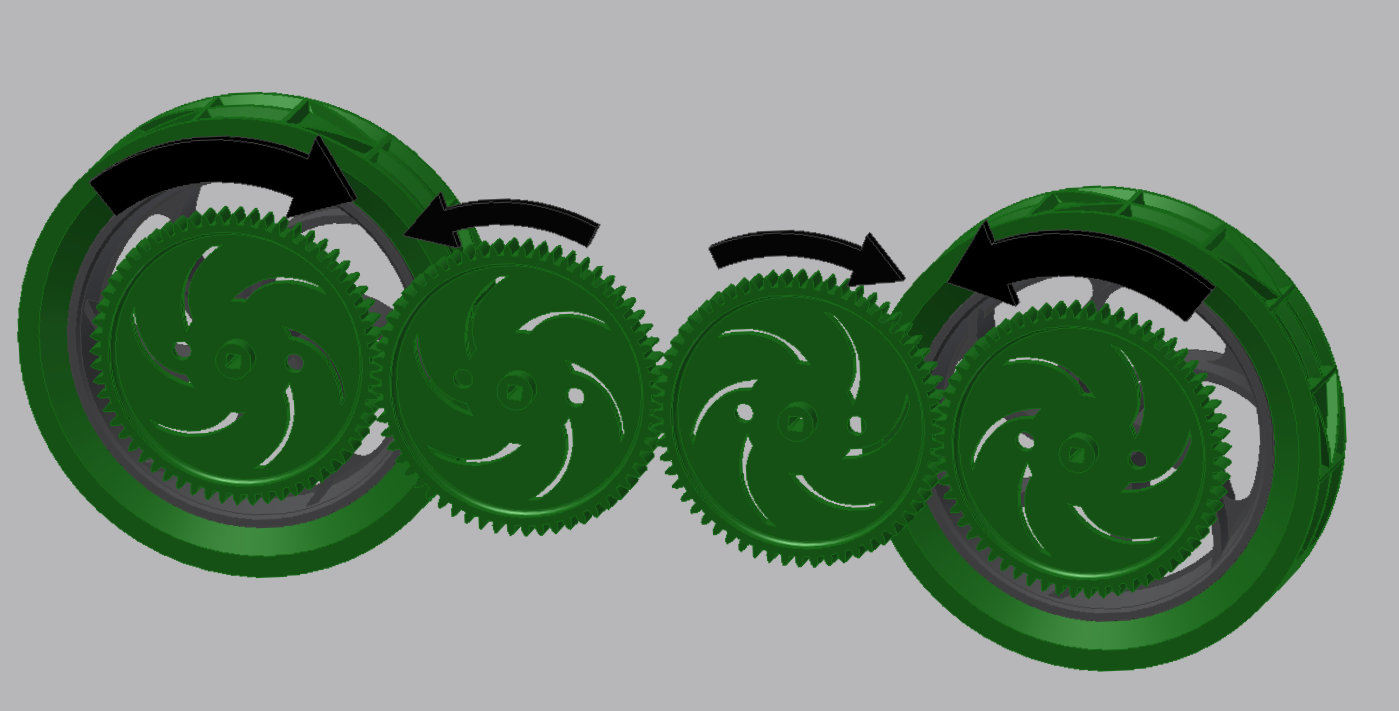
In the above example, the two wheels are spinning in opposite directions. Robots won’t drive anywhere when built this way.