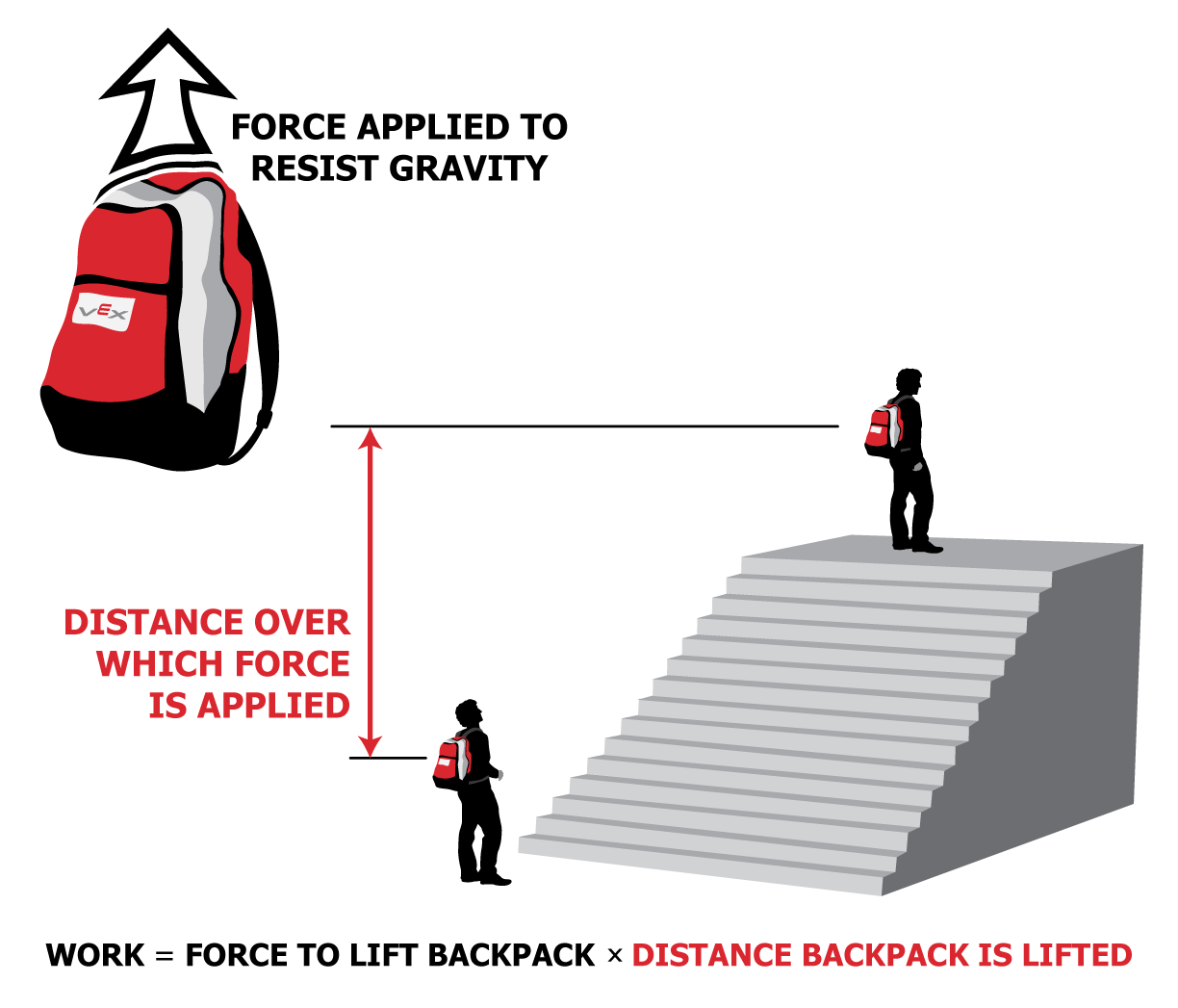
As described in Unit 7, power is the rate at which work is performed (i.e. how fast a student can carry a backpack holding 15 lbs of books up a flight of stairs.) Power can also be thought of as the rate that energy is transferred (i.e. how fast can a student transfer the chemical energy in their muscles into mechanical energy to lift the backpack up the flight of stairs.)
Power transmission is simply defined as the transfer of energy from its place of generation or storage to a location where it does work. Look at electricity: electrical energy is stored in a battery; it is then transmitted through wires to a motor where it is converted into mechanical energy to do work.
Mechanical power can be similarly transmitted across large distances in a variety of ways. This unit will focus on the transfer of mechanical energy in the form of rotational motion (i.e. one has an input spinning at a speed with some torque, and one needs to transfer the power from this input to a different output.)
Shafts transfer motion from point to point along their axis of motion. A common example of this is the drive axle of a car. Power is transferred into shafts via keys, splines, or polygonal shafts.
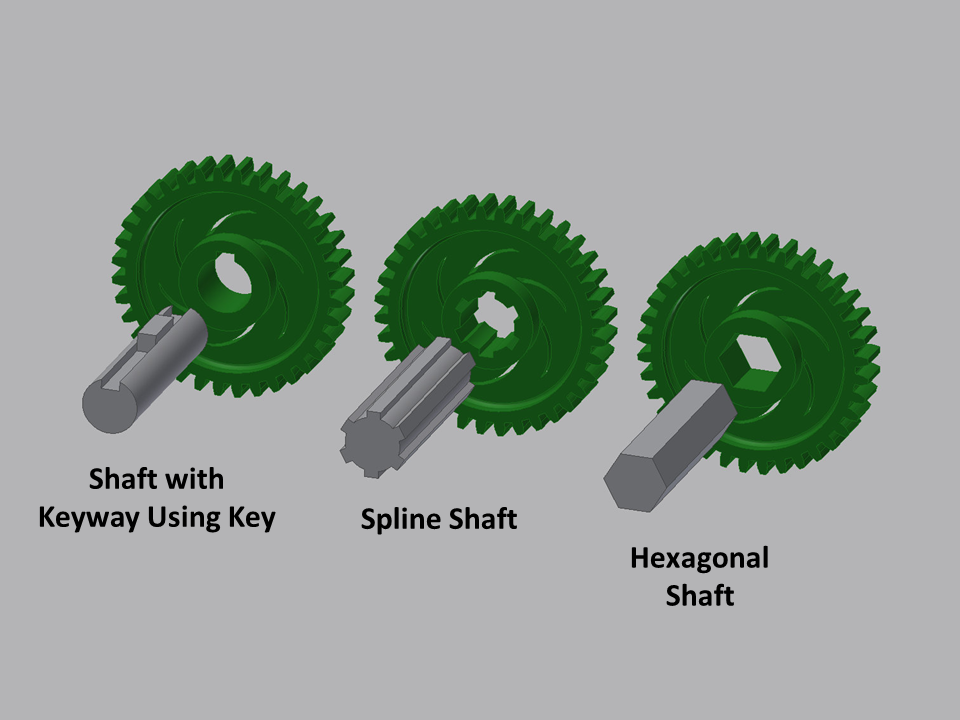
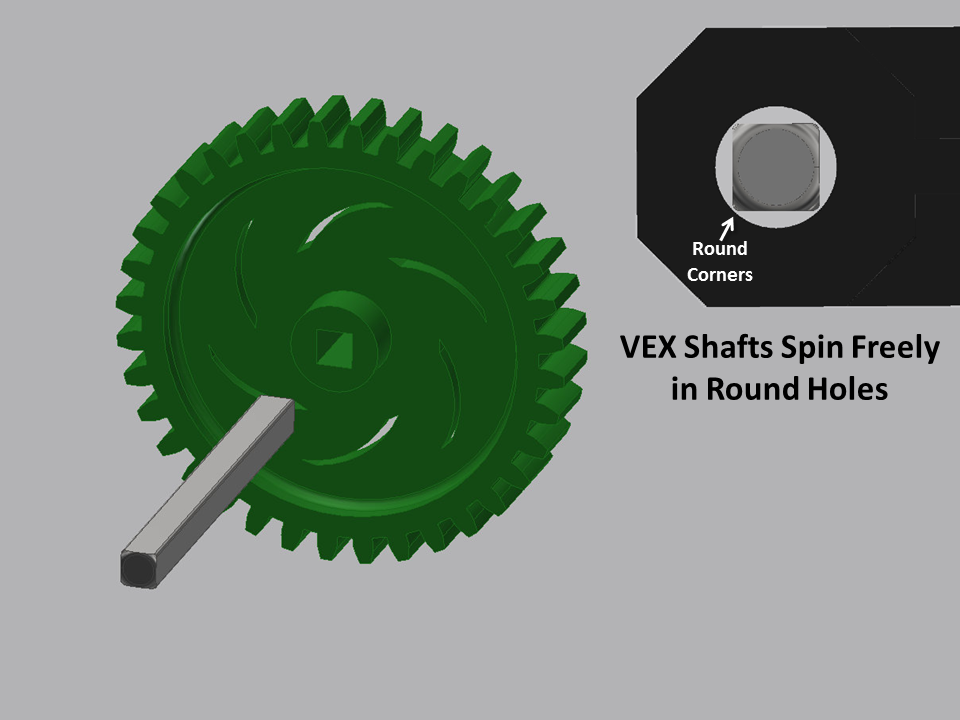
VEX uses a four-sided polygon (square) shaft as part of its motion system. This means that the shaft will transfer torque directly to anything which has a matching square hole. This square shaft also has rounded corners, which allow the shaft to spin freely in a larger-size round hole.
Gears are another method of mechanical power transmission. There are many different types of gears, and they are found very commonly in the world.
SPUR GEARS:
The most common type of gear is called a spur gear. When most people think of gears, they think of spur gears.
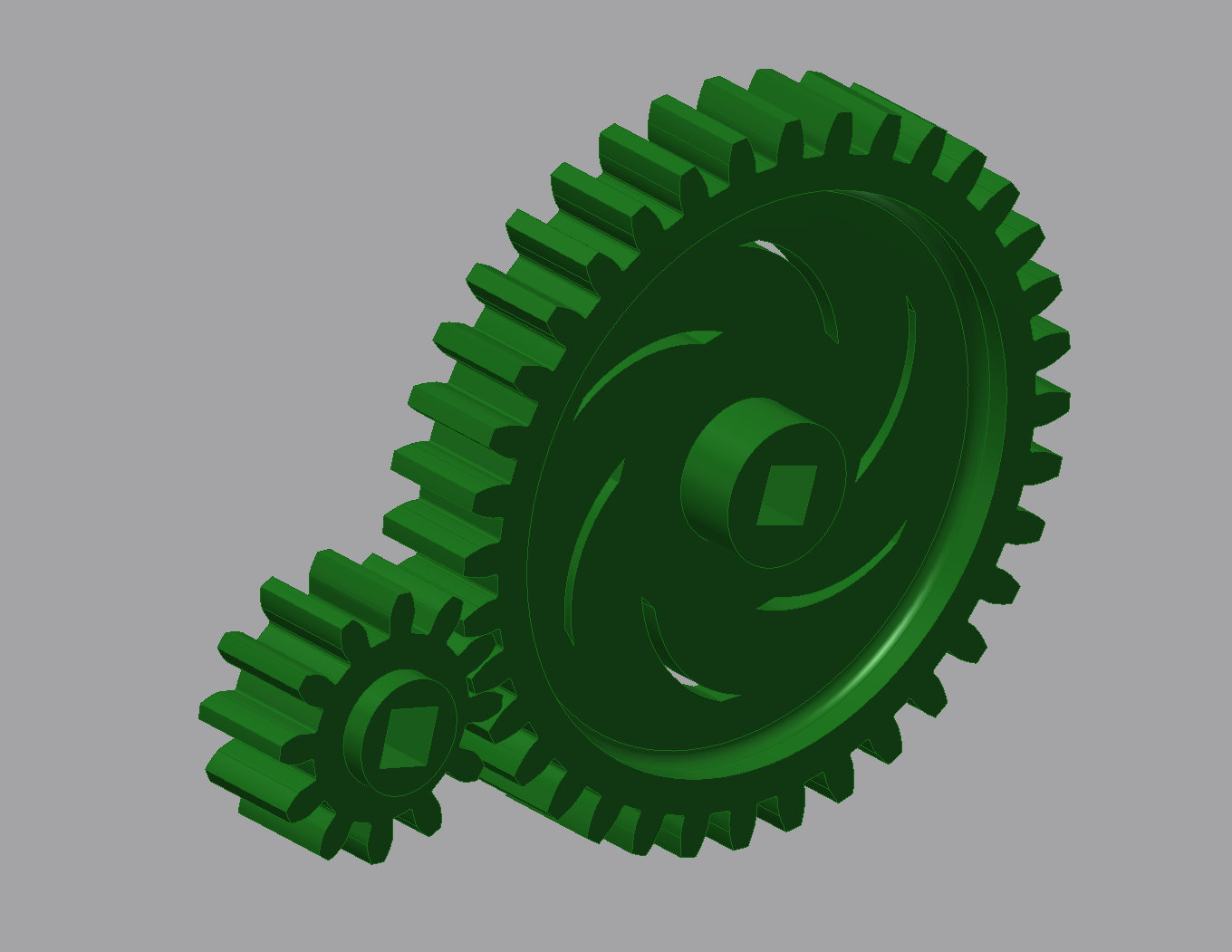
Spur gears transfer motion between two shafts running parallel to each other. Spur Gears are characterized by their teeth, which are straight and parallel to the gear’s axis of rotation. These are the primary form of mechanical power transfer used in the VEX Robotics Design System. In addition, spur gears are found in the real world in everything from automobiles to the mechanism that opens the tray on a DVD player.
BEVEL GEARS:
Bevel gears are conically shaped, and transmit power between shafts that have intersecting axes of motion.
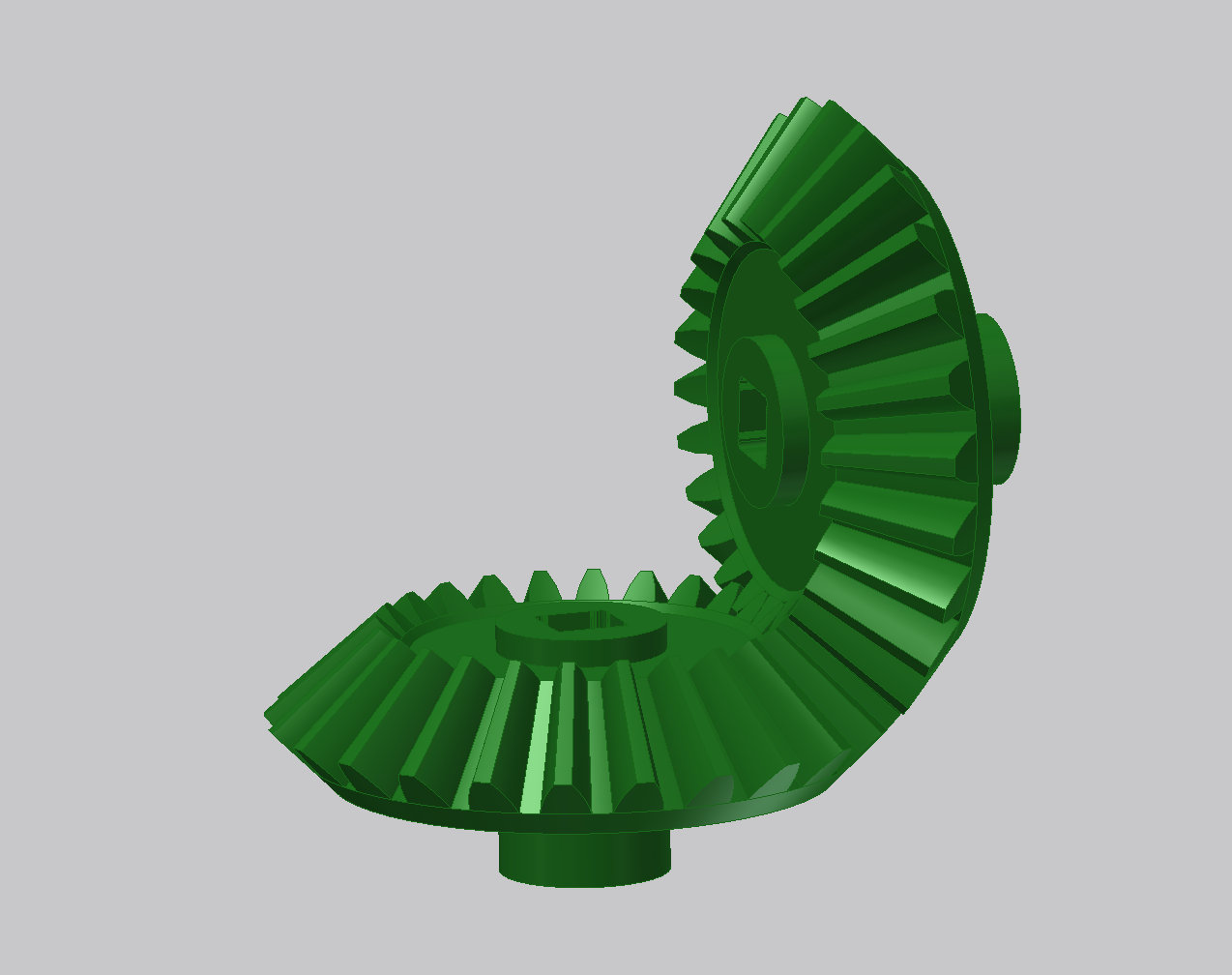
Bevel gears can transmit power between shafts at a variety of angles, but are most commonly used to transmit power 90-degrees as seen in the above example.
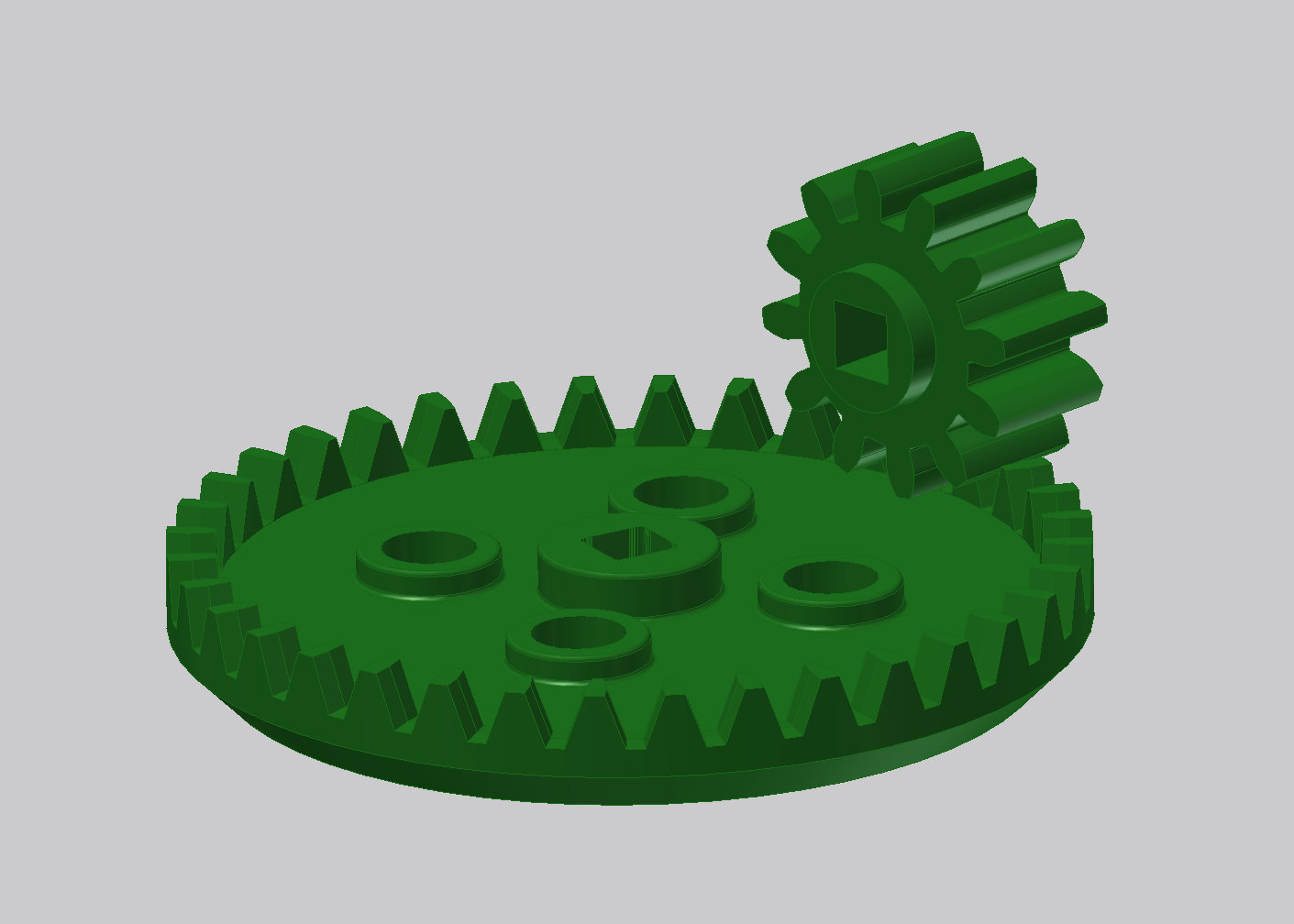
CROWN GEARS:
Crown gears are a type of bevel gear in which the teeth project perpendicular to the gear face.
Crown gears can mesh with other bevel gears and spur gears (as seen in the example above) so that motion is transferred between shafts with intersecting axes of rotation.
WORM GEARS:
Worm gears come in pairs: worm gears and worm wheels that mate together to transfer power between perpendicular shafts that have axes of rotation offset from each other.
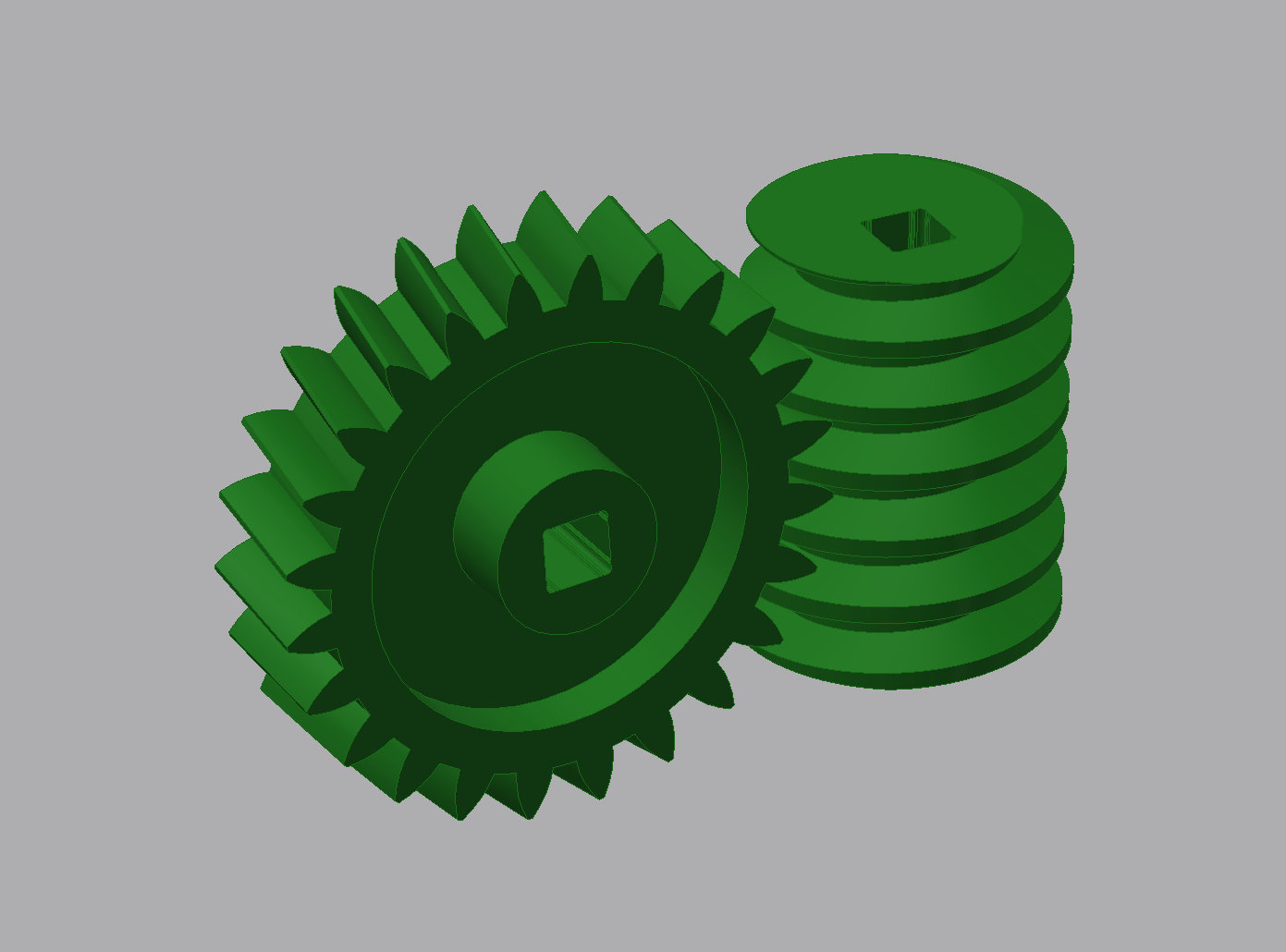
Worm gears resemble screws; as they spin, they turn their mating worm wheel. This type of gear pair is very useful for creating a high mechanical advantage in a small form factor. In this type of gear pair, the worm gear can drive the worm wheel forward, but it is very difficult for the worm wheel to drive the worm gear. For this reason, these gears are useful for applications where the designer doesn’t want a mechanism to be back-driven.
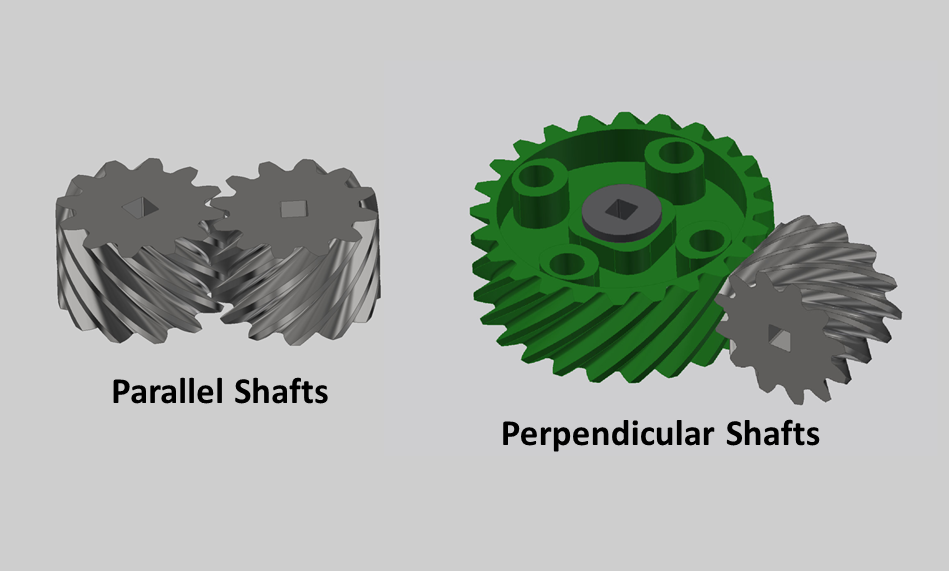
HELICAL GEARS:
Helical gears resemble spur gears, only their teeth are curved in the shape of a helix. These gears can be used to transmit power between two parallel axes of motion, or between perpendicular non-intersecting axes of motion.
EPICYCLIC (PLANETARY) GEARS:
An epicyclic or planetary gear set consists of one or more planet gears moving along an outer ring gear as a central sun gear drives them. As the planet gears are driven, they typically move a planet carrier plate along with them.
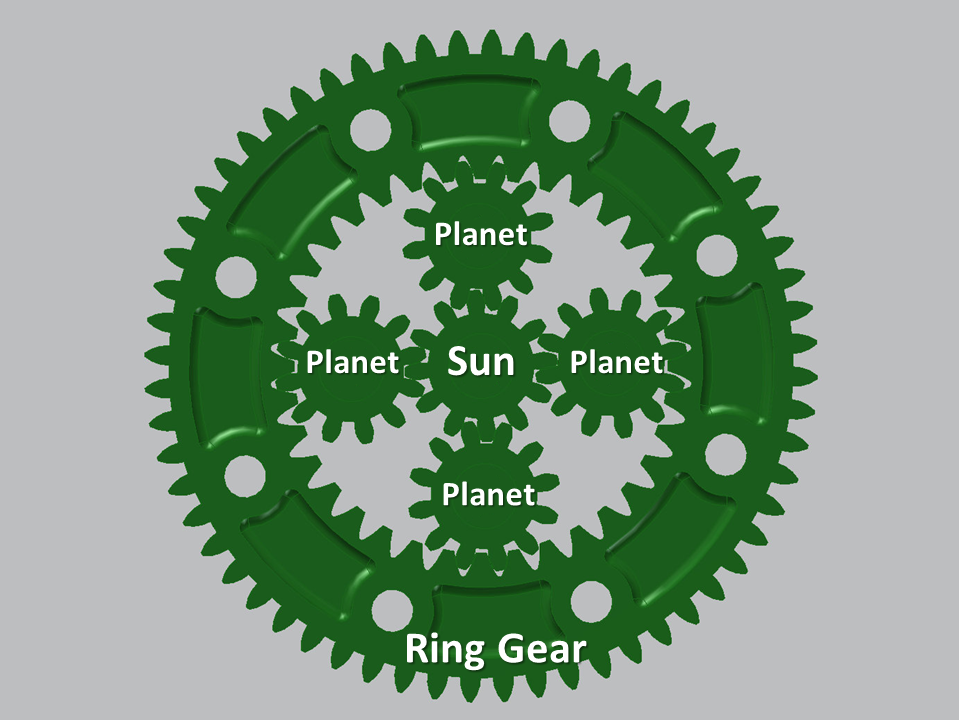
Interestingly, planetary gears can be used in a variety of ways with different gears serving as the inputs and outputs. For example, one might use the sun gear as the input and the planet carrier as the output while the ring gear is held stationary, or one might use the ring gear as the input and the sun gear as the output while the planet carrier is held stationary. The overall mechanical advantage of a planetary gear set changes depending on the configuration used.
RACK GEARS:
A rack gear is a gear mounted to a straight rod, such that it moves in a linear fashion when torque is applied to it by a spur gear (known as the pinion gear).
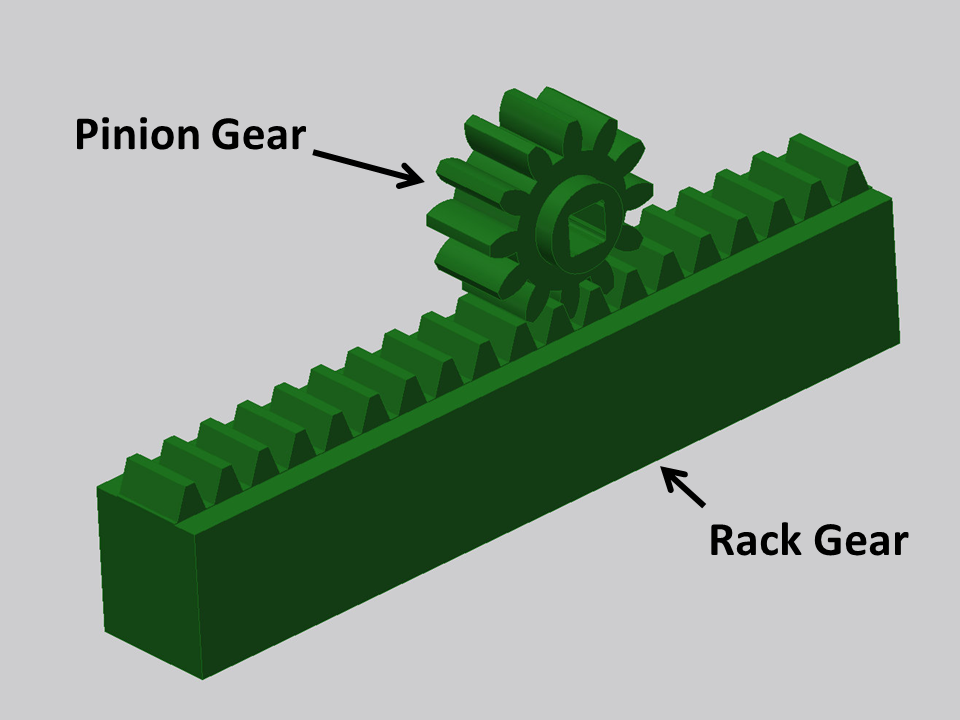
Rack and pinion gear sets are commonly used to convert rotational motion to linear motion. Cars utilize this type of gear set to convert the rotary motion of a steering wheel into a linear left/right motion required to steer the car. This is why it is called rack and pinion steering.
Within competition robotics there are many applications where rack gears can be used to create linear actuators for driving mechanisms.