In Competition Robotics, one can classify most object manipulators into three basic categories.
Plows:
The first category consists of manipulators that apply a single force to the side of an object. They move objects without actually picking them up. One of the most common forms of this manipulator is a simple plow.
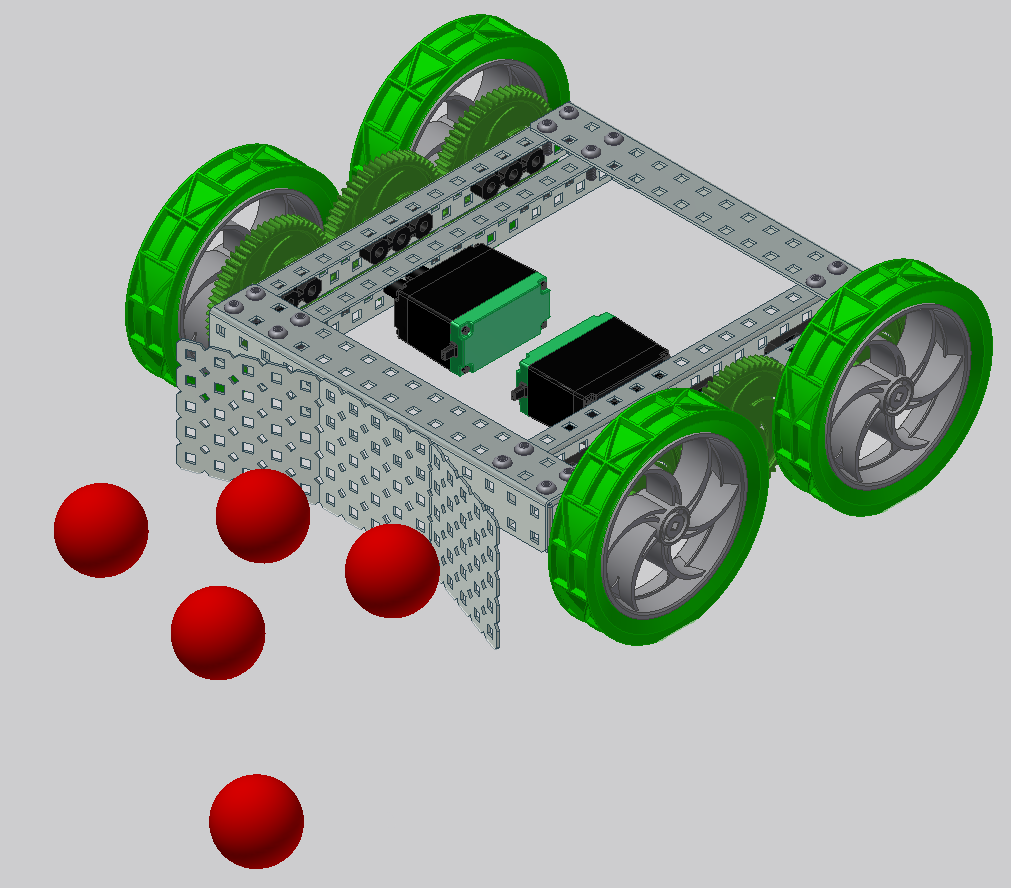
Scoops:
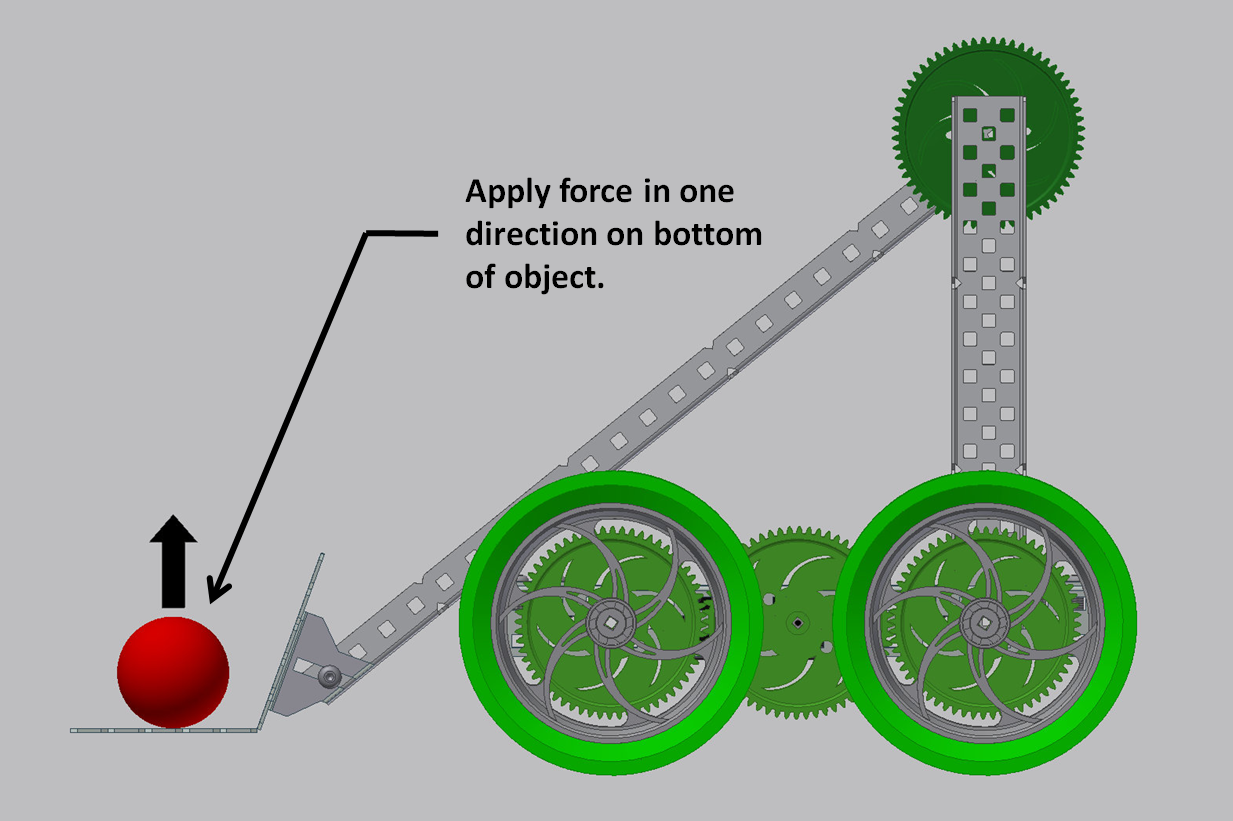
The second category comprises manipulators that apply force underneath an object such that the object can be elevated and carried. The most common form of this manipulator type is a scoop.
Click here to download and view this video offline.
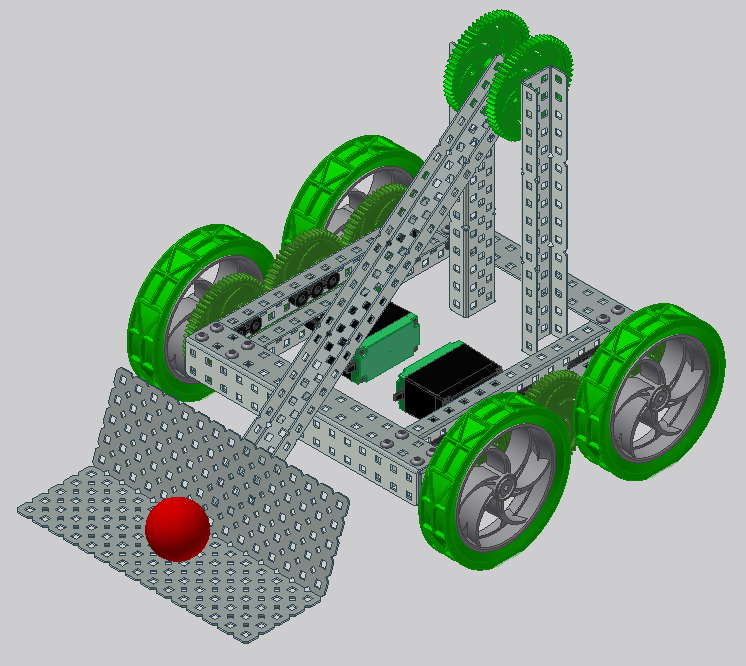
This video shows an articulated scoop
Friction Grabbers:
The third category comprises manipulators that apply a normal force between the object and a traction pad, and then rely on the frictional force between the object and this traction pad to manipulate the object. This manipulator category can be described as friction grabbers. The most common form of this manipulator is a claw which pinches an object – the claw fingers pressing against the object provides the normal force, and the friction between the fingers and the object allows for the object to be manipulated.
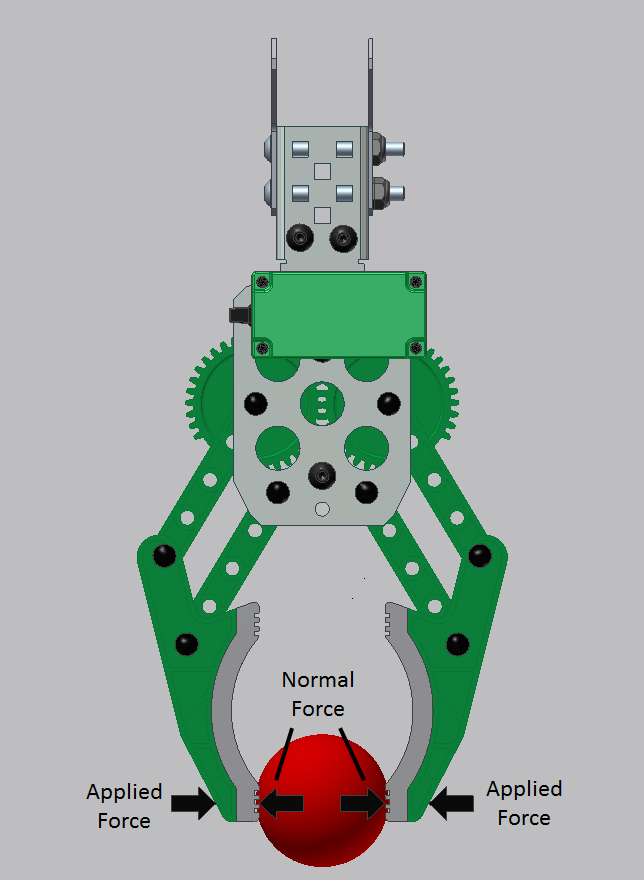
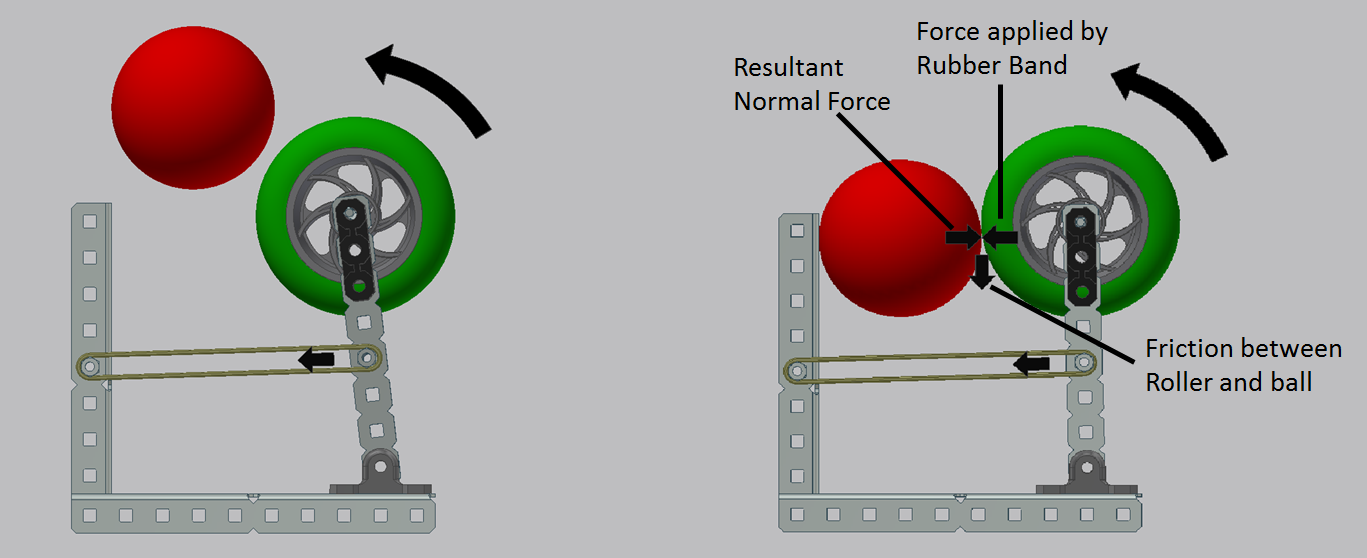
The above image shows the force exerted by the claw fingers on the ball, and the resulting normal forces.
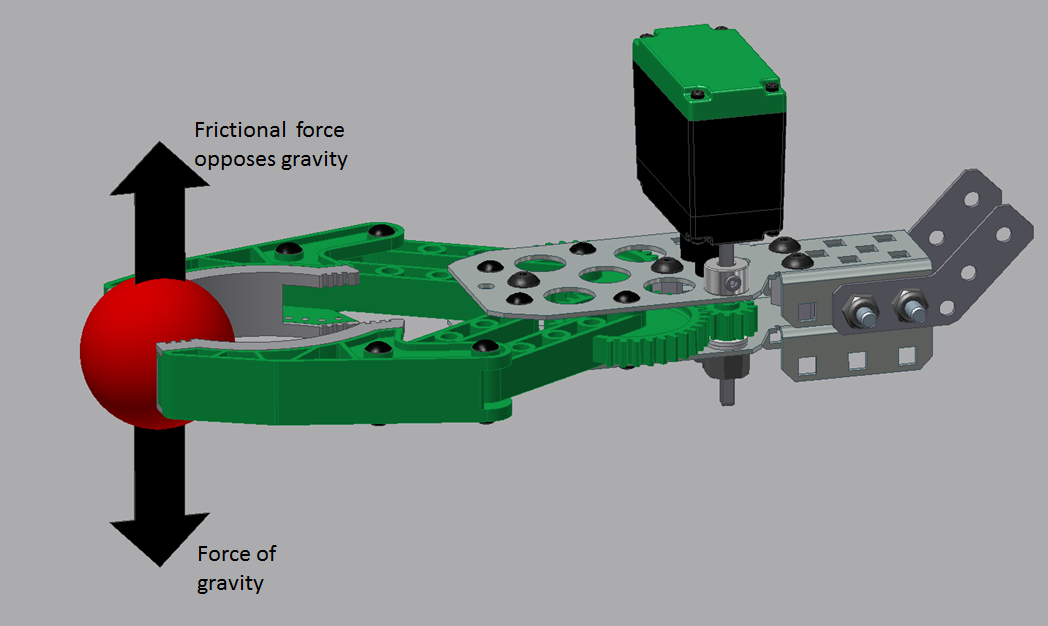
The above image shows the friction force between the ball and claw fingers opposing the force of gravity pulling down on the ball.
Click here to download and view this video offline.
This video shows some applications of friction grippers.
These categories of manipulators are not mutually exclusive; object manipulators can utilize aspects of more than one but using these categories enables a designer to describe almost all types of manipulators. Some common manipulators from competition robotics can be seen below.
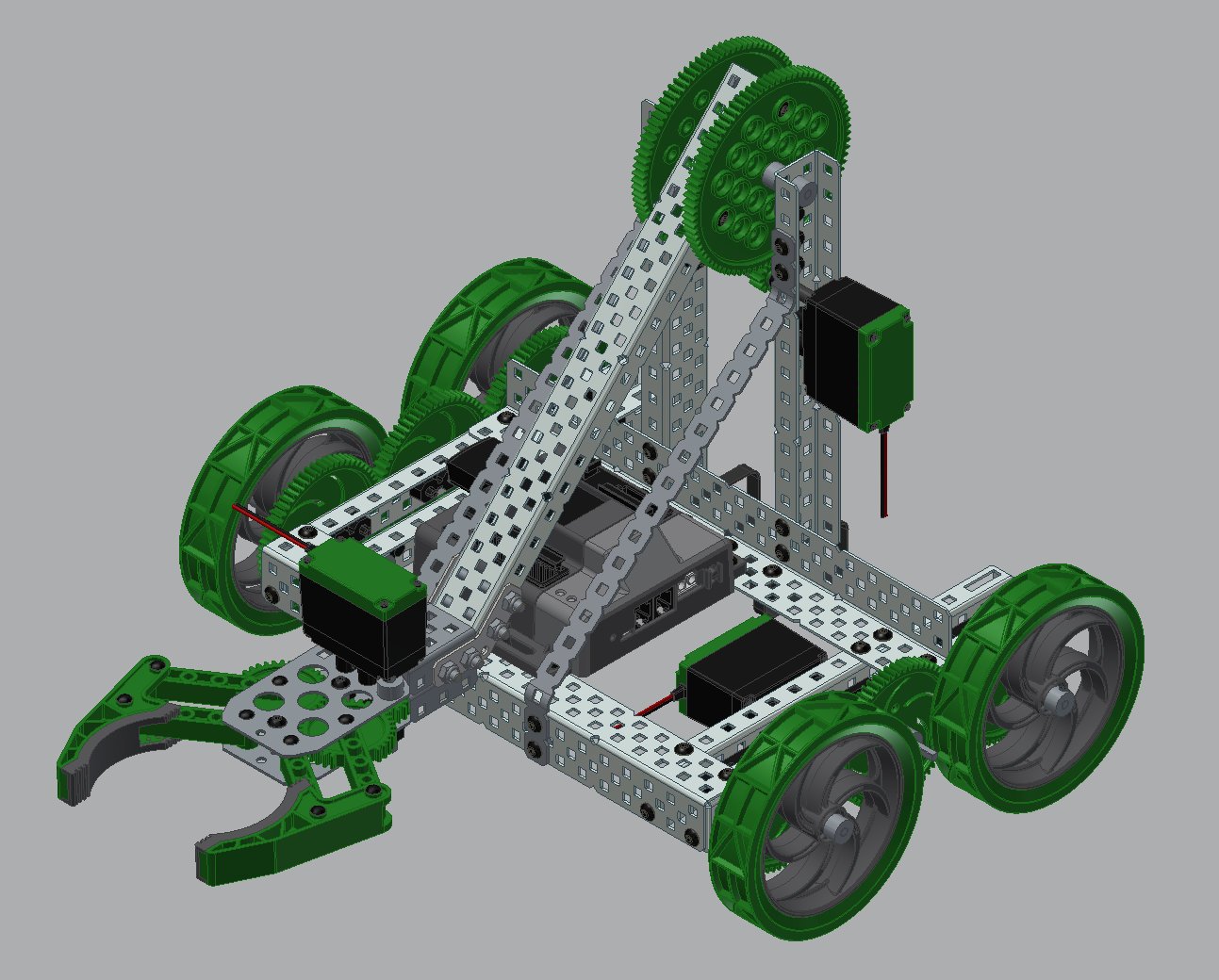
Pinching Claw:
As mentioned above, pinching claws are great examples of friction grabbers. With just a few minor tweaks one can configure a pinching claw to accommodate a wide variety of objects; many different types are possible.

Designers creating a pinching claw should include some sort of elastic “give” in the design. This elasticity should be present in either the object being gripped (i.e. a squishy ball) or in the claw itself (i.e. flexible fingers). Including this elasticity will allow for a more consistent object grip since it will help to provide a more consistent normal force on the object. This consistent normal force will provide a consistent frictional force and result in a solid grip.

The above image shows an example of claw elasticity – the claw has flexible fingers on each gripping arm.

The above image shows an example of object elasticity – the foam cube is compressing as the claw pinches it.
Good pinching claw designs don’t require the motor to be continually powered to maintain grip on the object. Some pinching claws utilize internal springs to continually provide force, others have some sort of locking mechanism, and some simply include an actuation mechanism which cannot be back-driven (i.e. worm gear).
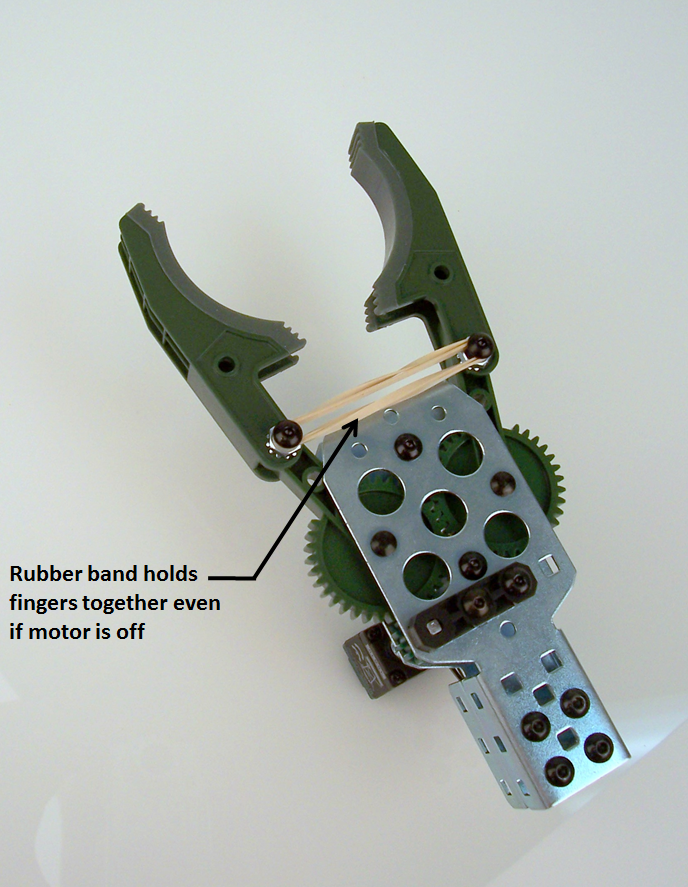
The above image shows an example of a claw which uses rubber bands to stay spring-loaded closed.
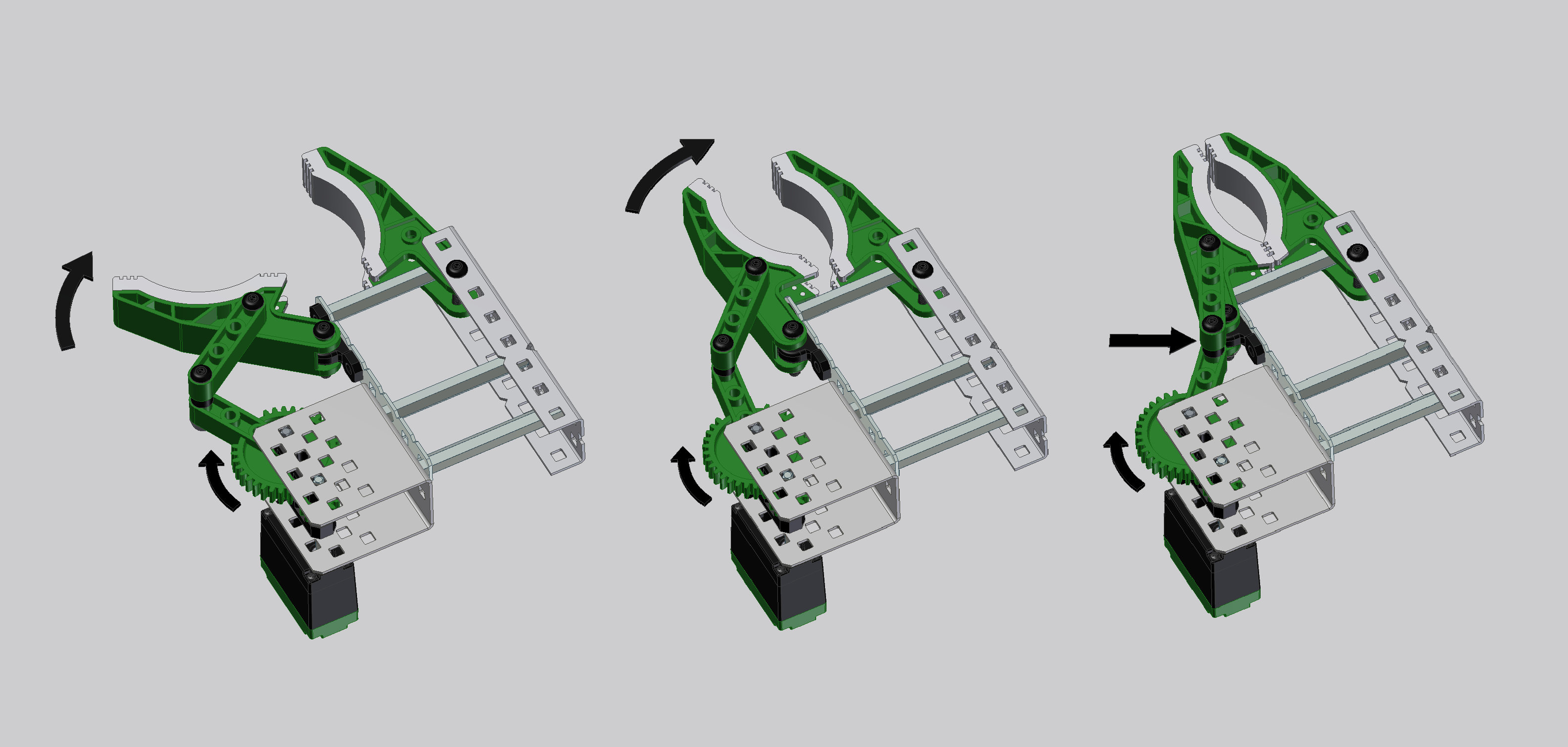
The above image shows an example of a claw that uses a mechanical linkage to lock closed.
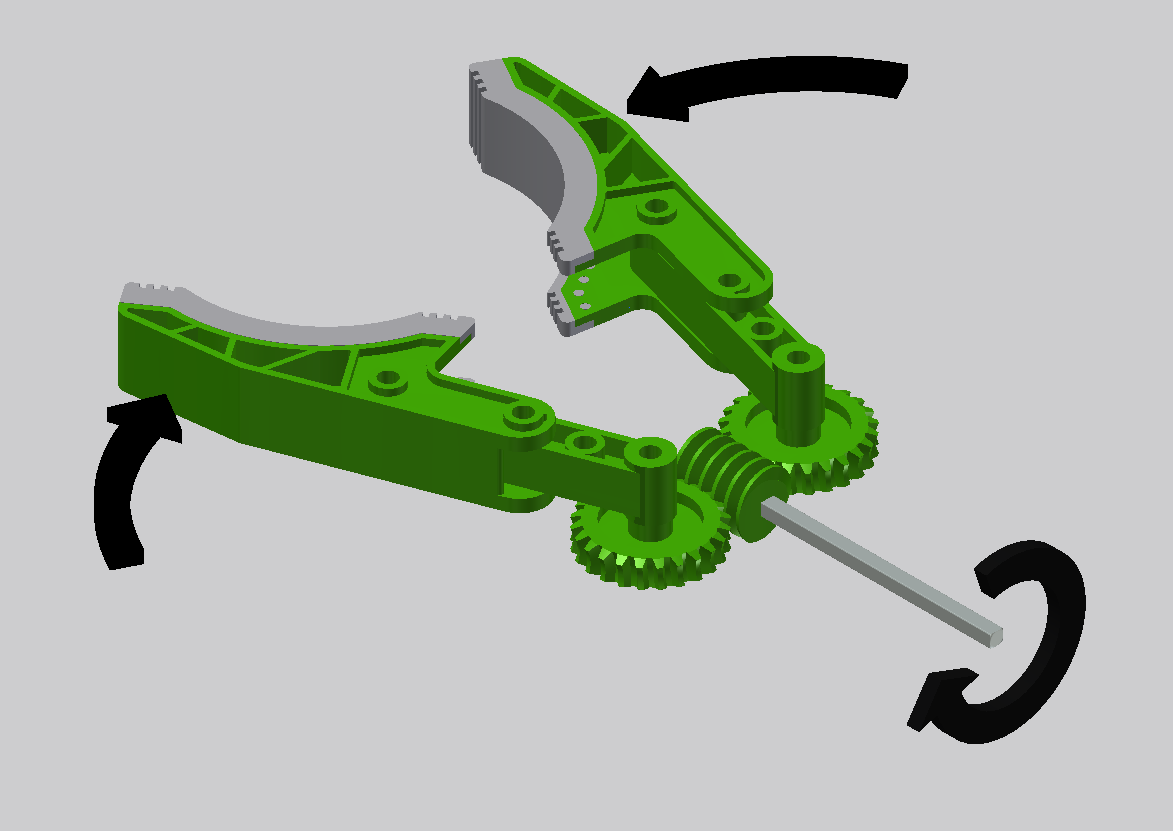
The above image shows an example of a claw driven by a worm gear.
Top-Jaw Grabber:
Another common type of competition object manipulator is a “top-jaw” type design.
This type of manipulator consists of a stationary lower jaw with an actuated top jaw. It is a combination of a scoop and a friction grabber. The lower jaw provides upwards normal force under the object, while the top jaw pressing down provides friction-grabber type normal force which results in a frictional force that keeps the object from moving side to side.
Roller Claws:
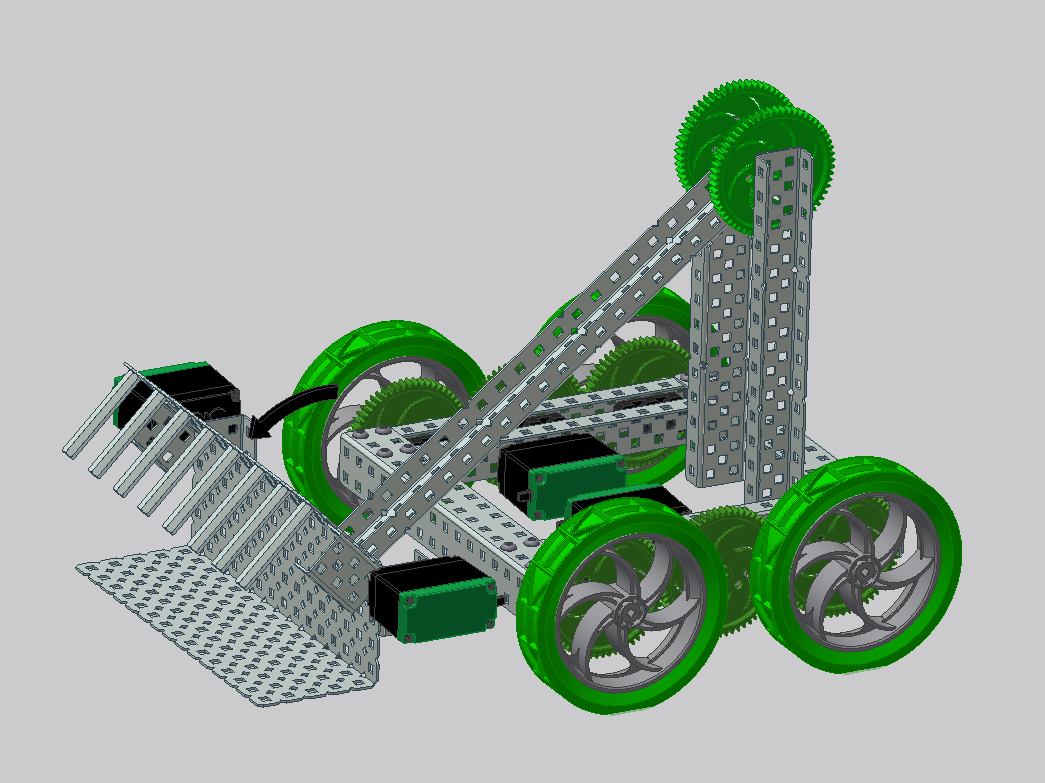
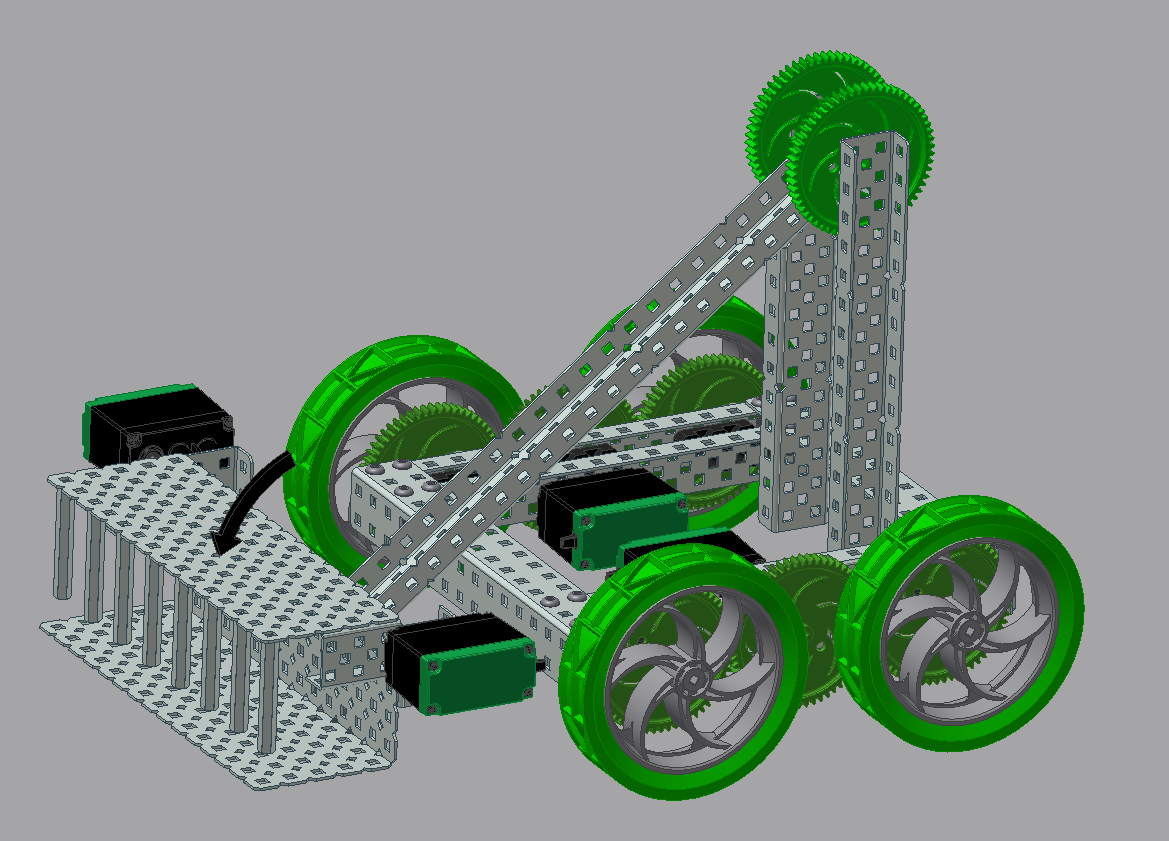
One of the most common and successful types of object manipulators used in competition robotics is the “roller claw.” This type of manipulator uses rotating wheels or rollers to “suck in” the game objects. This is an example of a friction grabber since the mechanism relies on of the friction between the rollers and the objects to hold them in place.


As discussed above, this claw relies on some sort of elasticity to maintain friction – either the object needs to give, or the claw does. This is an especially important consideration in a roller claw because the actuation mechanism isn’t in the direction providing normal force (i.e. if the rollers are too far apart it doesn’t matter how fast they spin since there is no elasticity to provide normal force on the object).
Roller Claws are extremely popular in competition robotics since they allow for very quick pickup of game objects without a requirement for fine positioning. Robot drivers just need to turn on the rollers, touch the object with the front of the roller claw, and it will suck the object in without any further control. Some designs are setup to automatically turn off the roller claw motor once the object has been grabbed (as previously described, good object manipulators don’t require to be powered to maintain grip).
Click here to download and view this video offline.
This video shows a roller claw mounted on a robotic arm