The field of Classical Mechanics deals with the study of bodies in motion, specifically the physical laws that govern bodies under the influence of forces. Much of the mechanical aspects of robotics design are heavily tied to the principles of this field. This unit will describe a few key concepts of Classical Mechanics that are particularly applicable.
SPEED – A measure of how fast an object is moving. Describes a change in position with time (or more simply put, how far an object will travel over a given period of time.) This measure is given in units of distance per time (i.e. miles per hour, or feet per second.)
ROTATIONAL SPEED – Speed can also be expressed rotationally. This refers to how fast something is moving in a circle. It is measured in units of angular-distance per time (i.e. degrees per second) or rotational cycles per time (i.e. revolutions per minute.) When someone talks about “RPM” they are referencing rotational speed. When talking about the RPM of a car engine, one is describing how fast the engine is spinning.
ACCELERATION – A change in speed over a period of time is described as acceleration; the higher the acceleration the faster the change in speed. If a car goes from 0 miles per hour to 60 miles per hour in 2 seconds, it is a higher acceleration than if the car goes from 0 MPH to 40 MPH in 2 seconds. Acceleration is a rate of change of speed. No change means no acceleration – if something is moving at constant speed it is not accelerating.
FORCE - Accelerations are caused by forces; they are influences that cause a change of movement, direction or shape. When one presses on an object, they are exerting a force on it. When a robot is accelerating, it does so because of the force its wheels exert on the floor. Force is measured in units such as Pounds or Newtons.
For instance, the weight of an object is the force on the object due to gravity (accelerating the object towards the center of the earth.)
TORQUE – Force directed in a circle (rotating an object) is known as torque. Torque is a spinning force. If torque is spinning an object, the object will create a linear force at its edge. In the instance of a wheel spinning on the ground, the torque applied to the wheel axle creates a linear force at the edge of the tire where it contacts the ground. This is how one defines torque, a linear force at the edge of a circle. Torque is described by the magnitude of the force multiplied by the distance it is from the center of rotation (Force x Distance = Torque). Torque is measured in units of force*distance, such as Inch-Pounds of Newton-Meters.
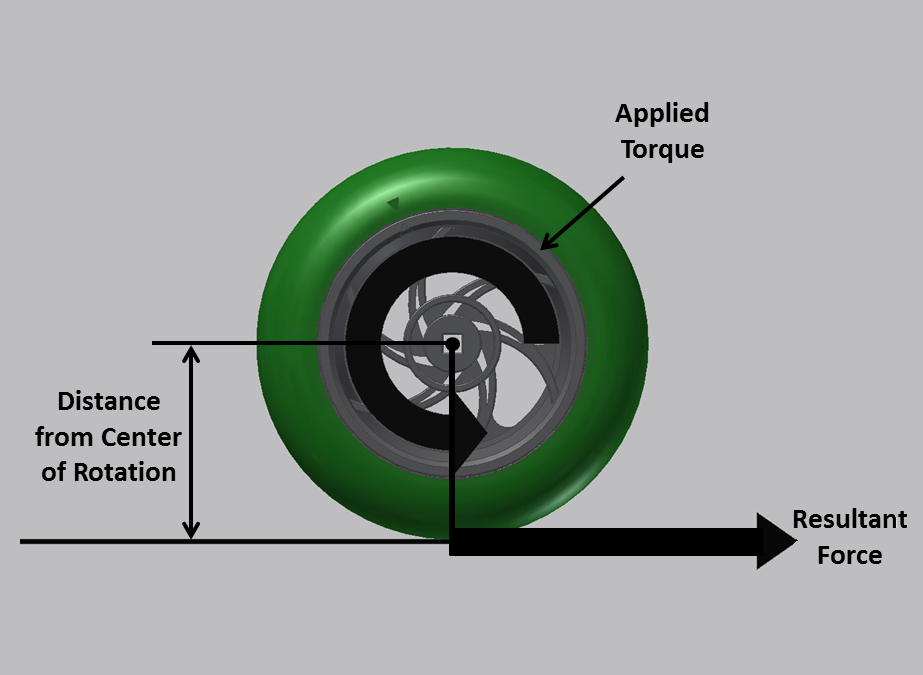
In the above example of a wheel on a surface, if we know how much torque is applied to an axle with a wheel on it, we can find out how much force the wheel is applying on the floor. In this case, the wheel radius would be the distance the force is from the center of rotation.
Force = Torque / Wheel Radius
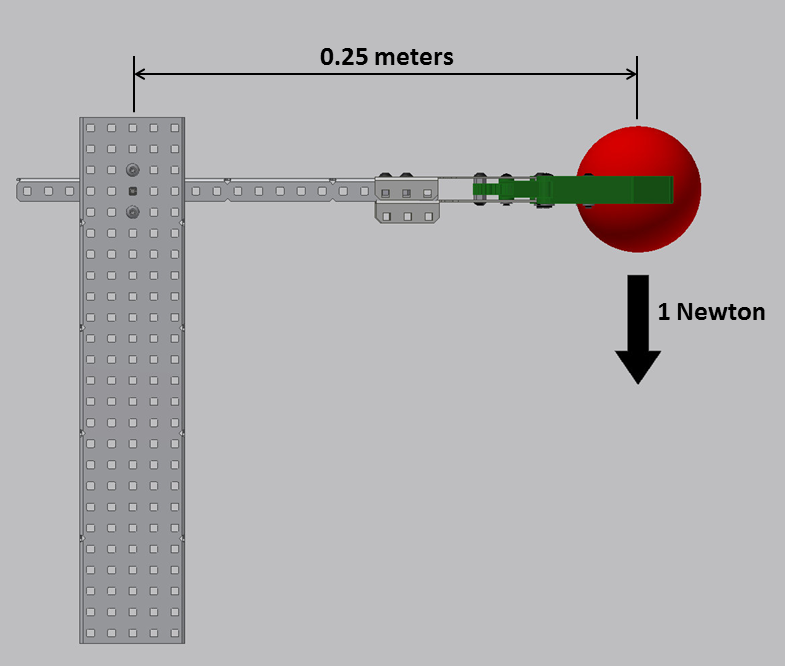
In the above example of a robot arm holding an object, we can calculate the torque required to lift the object. Since the object has a weight of 1 Newton, and the arm is 0.25 meter long (the object is 0.25 meters from the center of rotation), then
Torque = Force x Distance = 1 Newton x 0.25 Meter = 0.25 Newton-Meters.
This means the torque required to hold the object stationary is 0.25 Newton-Meters. In order to move it upwards the robot needs to apply MORE torque than 0.25 Newton-Meters to overcome gravity. The more torque the robot has, the more force it exerts on the object, the greater the acceleration on the object, and the faster the arm will lift it up.
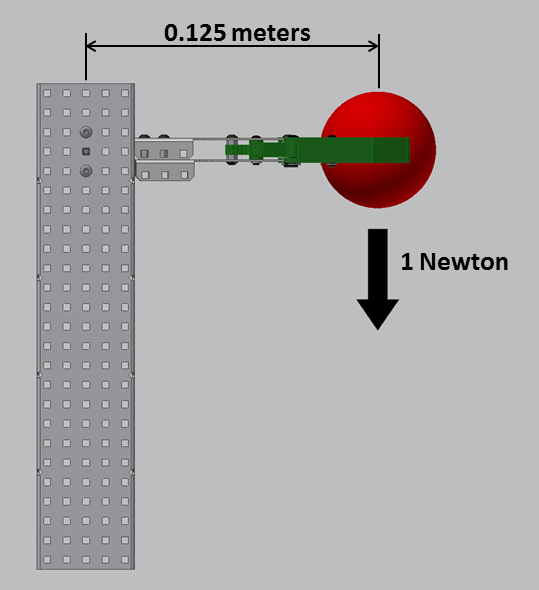
Example 7.2
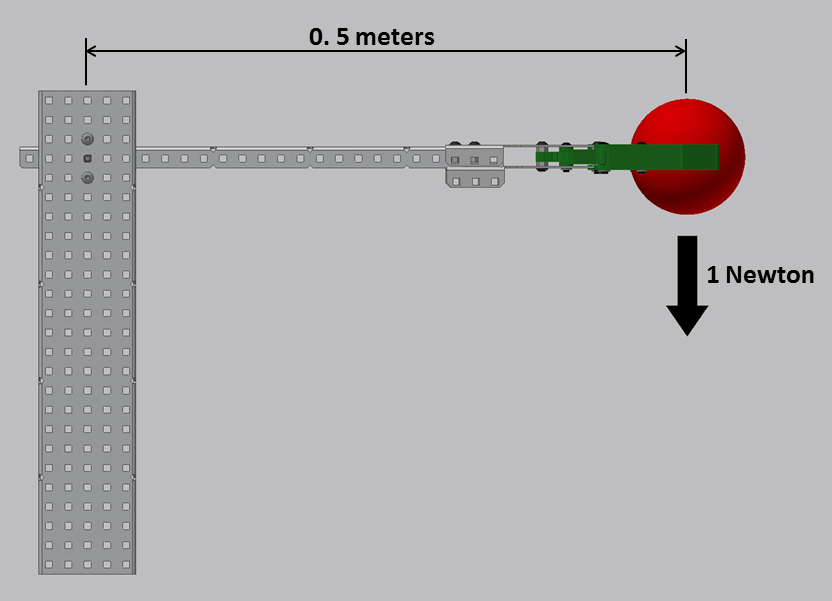
Example 7.3
For these examples, we can calculate the torque required to lift these objects as well.
Example 7.2 – Torque = Force x Distance = 1 Newton x 0.125 meters= 0.125 Newton-Meters.
In this example, the arm is half the length of Example 1, and the torque required is also half. The arm length is proportional to the torque required; shorter arms require less torque to lift the same object as longer arms.
Example 7.3 – Torque = Force * Distance = 1 Newton x 0.5 meters = 0.5 Newton-Meters.
In this example, the arm length is double the length of Example 1, and the torque required is also double.
Another way to think of this is if a robot has limited torque at its arm joint, a shorter arm will be able to lift more weight than a long arm (but it can’t lift it as high.)
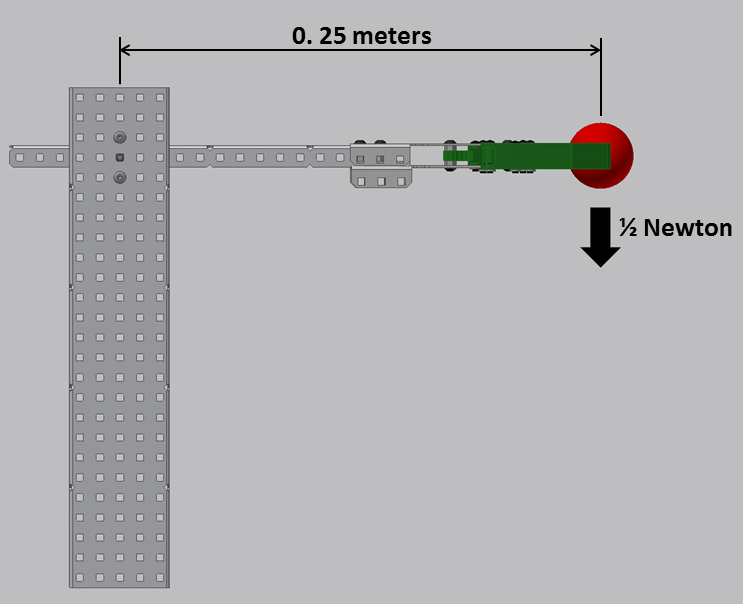
Example 7.4
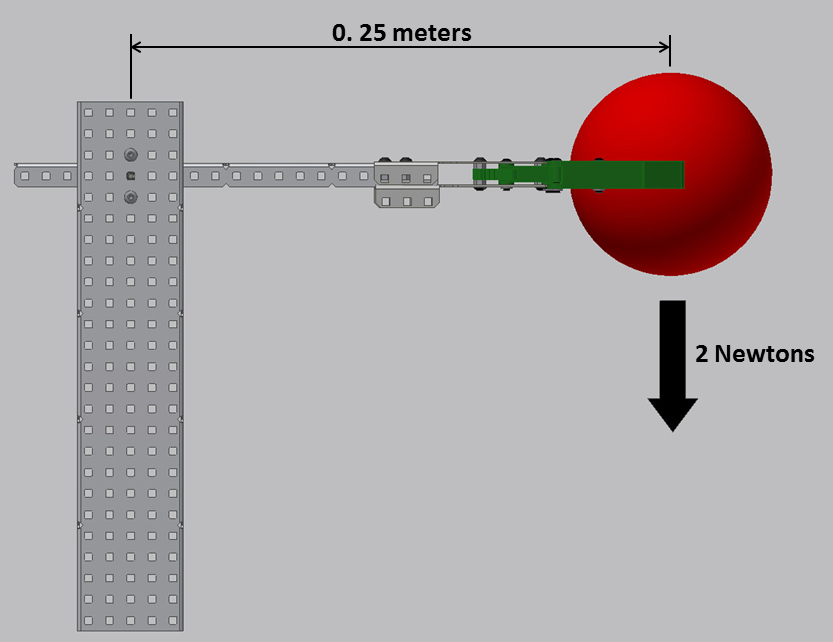
Example 7.5
These examples have the same robot arm lifting objects of different weights. How does this affect the required arm torque?
Example 4 – Torque = Force x Distance = ½ Newton x 0.25 meters = 0.125 Newton-Meters
Example 5 – Torque = Force x Distance = 2 Newton x 0.25 meters = 0.5 Newton-Meters
In these examples, as the weight of the object goes down, the torque required goes down as well. The applied weight is proportional to the torque required to lift it; heavier objects require more torque to lift.
Budding robotics designers should note these key relationships between torque, arm length, and object weight.
WORK – The measure of force exerted over a distance is referred to as work. For instance, say it takes 10 pounds of force to hold an object. It would then take a certain amount of work to lift this object 10 inches, and it would take double that work to lift it 20 inches. Work can also be thought of as a change in energy.
POWER - Most people are more familiar with Power as an electrical term, but it is part of mechanical physics as well.
Power is defined as the RATE that work is performed. How fast can someone do their work?
In robotics design it is handy to think of power as a limit, since competition robotic systems are limited in the amount of power they can output. If a robot needs to lift a 2 Newton weight (exerting a 2 Newton force) the amount of power the robot can output limits how FAST (the rate) at which the robot can lift it. If the robot is capable of outputting lots of power, it will be able to lift it quickly. If it can only output a small amount of power, it will lift it slowly (or not at all!)

Power is defined as Force multiplied by Velocity (how fast one can push with a constant force), and is frequently expressed in units of Watts.
Power [Watts] = Force [Newtons] x Velocity [Meters / Second]
1 Watt = 1 (Newton x Meter) / Second
So how does this apply to competition robotics? Robot designers have certain power limitations they must remain below. Competition robotics designers using the VEX Robotics Design also need to consider the physical limitations presented by the motors. These motors have limited power, and they can only do so much work, so fast.
Note: these are basic descriptions of very advanced concepts. For more in-depth discussions of these physical properties, students should pursue higher education in the STEM fields.