A robot is a programmable mechanical device that can perform tasks and interact with its environment, without the aid of human interaction. Robotics is the science and technology behind the design, manufacturing and application of robots.
The word robot was coined by the Czech playwright Karel Capek in 1921. He wrote a play called “Rossum's Universal Robots” that was about a slave class of manufactured human-like servants and their struggle for freedom. The Czech word robota loosely means "compulsive servitude.” The word robotics was first used by the famous science fiction writer, Isaac Asimov, in 1941.
Basic Components of a Robot
The components of a robot are the body/frame, control system, manipulators, and drivetrain.
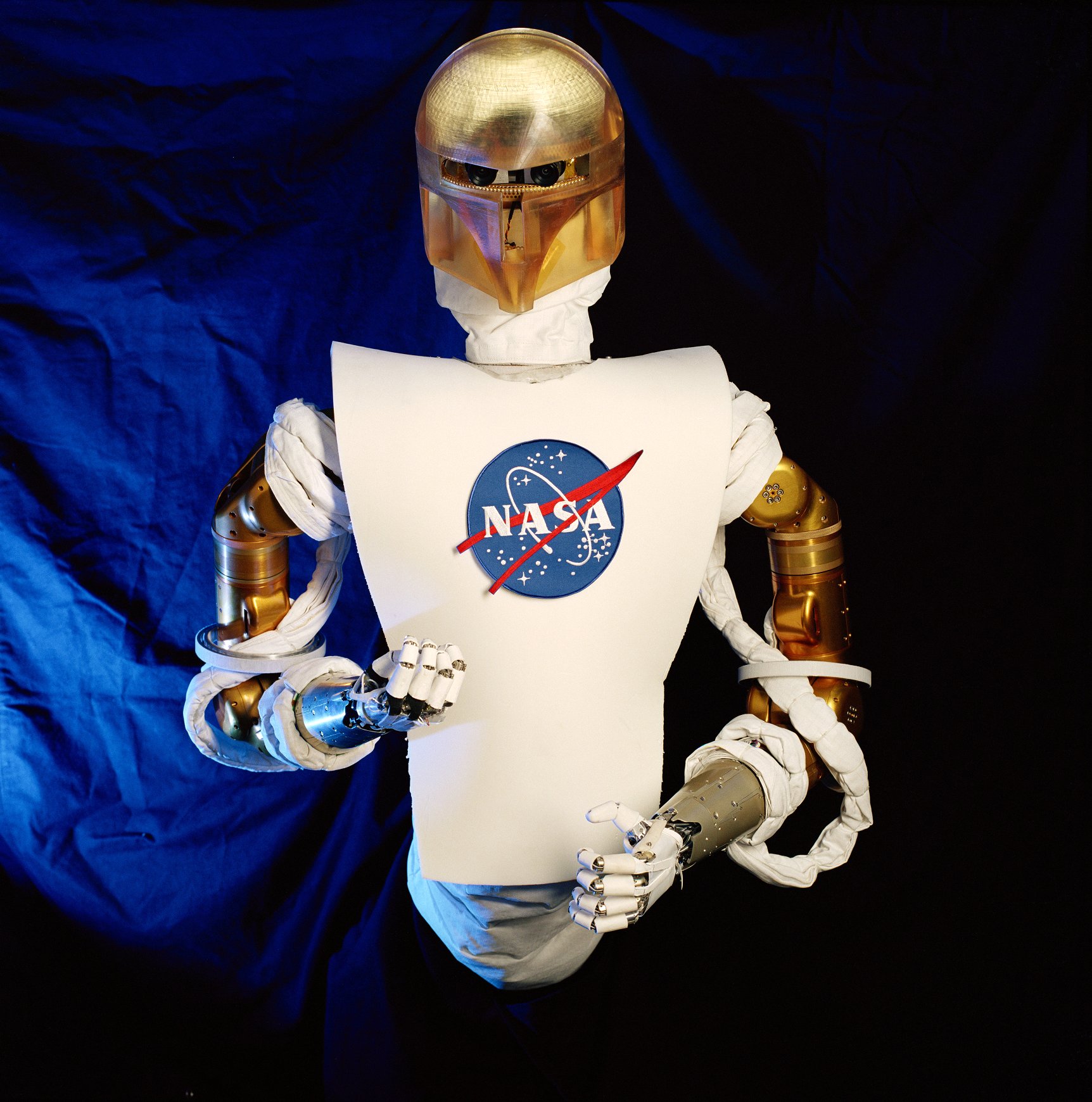
Body/frame: The body or frame can be of any shape and size. Essentially, the body/frame provides the structure of the robot. Most people are comfortable with human-sized and shaped robots that they have seen in movies, but the majority of actual robots look nothing like humans. (NASA’s Robonaut, pictured in the previous section is an exception.) They are typically designed more for function than appearance.
Control System: The control system of a robot is equivalent to the central nervous system of a human. It coordinates and controls all aspects of the robot. Sensors provide feedback based on the robot’s surroundings, which is then sent to the Central Processing Unit (CPU). The CPU filters this information through the robot’s programming and makes decisions based on logic. The same can be done with a variety of inputs or human commands.
Manipulators: To fulfill their purposes, many robots are required to interact with their environment, and the world around them. Sometimes they are required to move or reorient objects from their environments without direct contact by human operators. Unlike the Body/frame and the Control System, manipulators are not integral to a robot, i.e. a robot can exist without a manipulator. This curriculum focuses heavily on manipulators, especially in Unit 6.
Drivetrain: Although some robots are able to perform their tasks from one location, it is often a requirement of robots that they are able to move from location to location. For this task, they require a drivetrain. Drivetrains consist of a powered method of mobility. Humanoid style robots use legs, while most other robots will use some sort of wheeled solution.
Uses and Examples of Robots
Robots have a variety of modern day uses. These uses can be broken down into three major categories:
- Industrial Robots
- Robots in Research
- Robots in Education
Industrial Robots
In industry, there are numerous jobs that require high degrees of speed and precision. For many years humans were responsible for all these jobs. With the advent of robotic technology, it became evident that many industrial processes could be sped up and performed with a higher degree of precision by the use of robots. Such jobs include packaging, assembly, painting, and palletizing. Initially robots in industry only performed very specialized and repetitive jobs that could be executed with a simple yet precise set of instructions. However as technology has improved, we now see industrial robots that are much more flexible, making decisions based on complex sensor feedback. Vision systems are now common on industrial robots. By the end of 2014, the International Federation of Robotics predicts that there will be over 1.3 million industrial robots in operation worldwide!

Robots can be designed to perform tasks that would be difficult, dangerous, or impossible for humans to do. For example, robots are now used to defuse bombs, service nuclear reactors, investigate the depths of the ocean and the far reaches of space.
Robots in Research
Robots come in very handy in the world of research, as they often can be used to perform tasks or reach locations that would be impossible for humans. Some of the most dangerous and challenging environments are found beyond the Earth. For decades, NASA has utilized probes, landers, and rovers with robotic characteristics to study outer space and planets in our solar system.
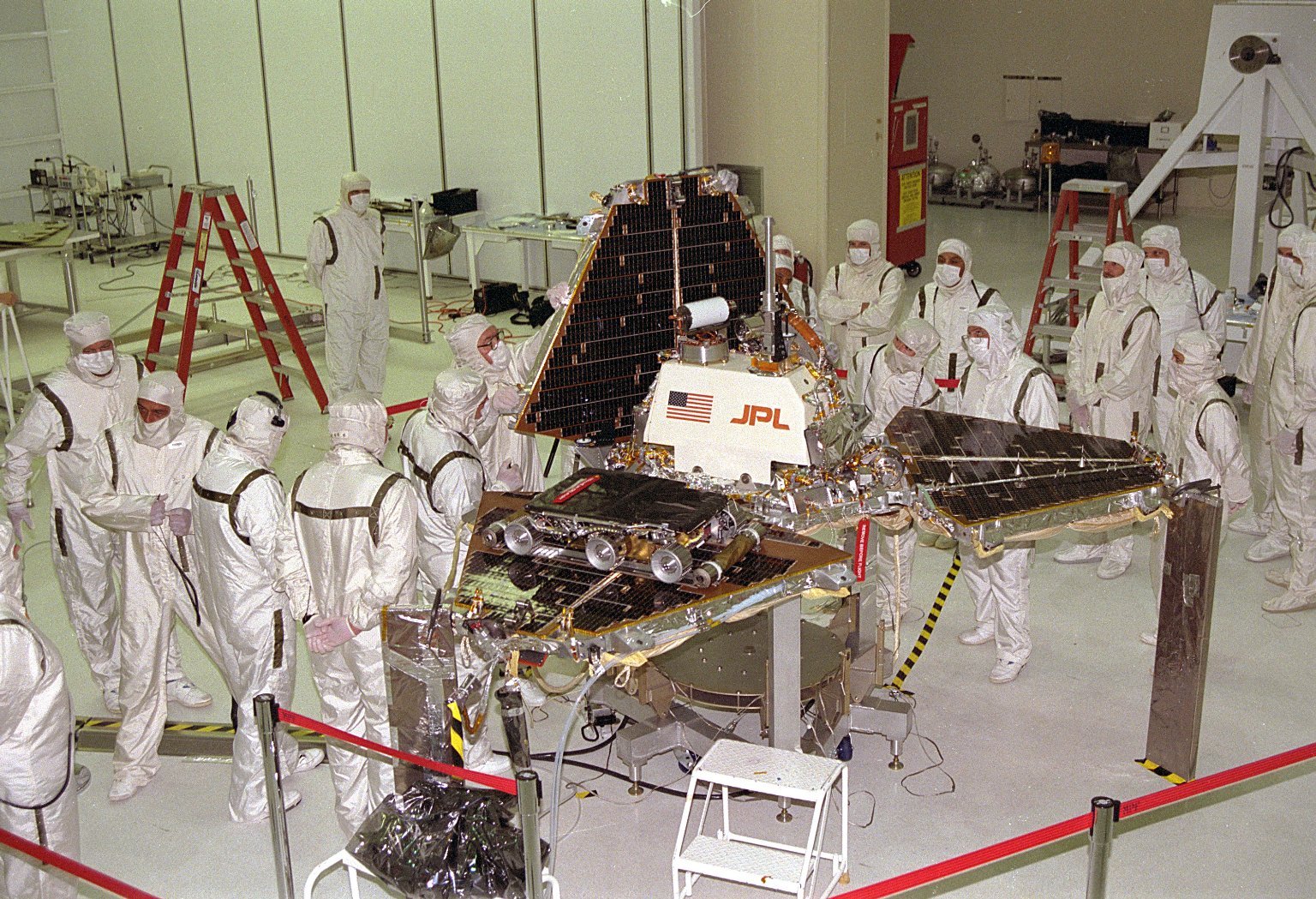
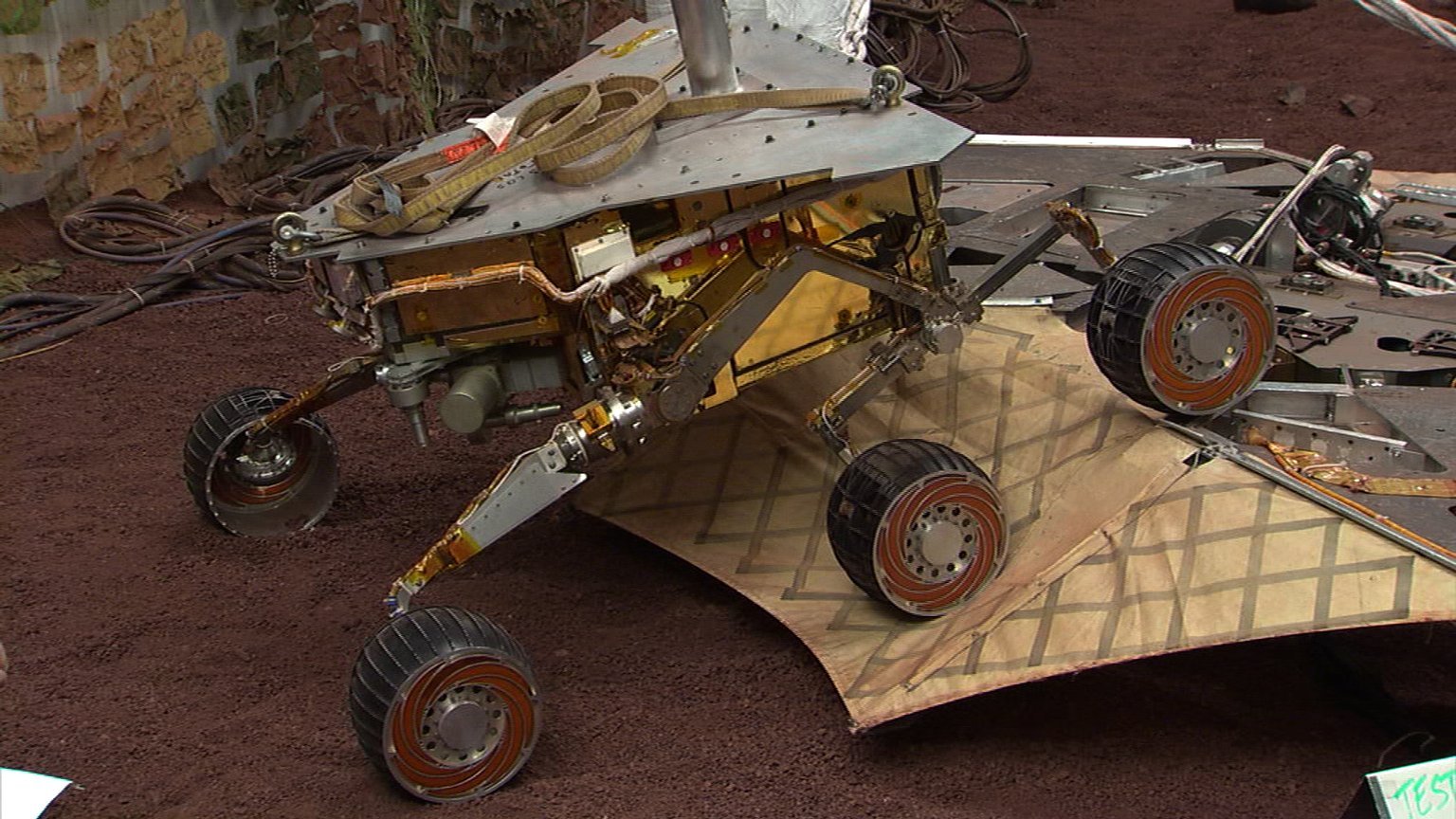
Pathfinder and Sojourner
The Mars Pathfinder mission developed a unique technology that allowed the delivery of an instrumented lander and a robotic rover, Sojourner, to the surface of Mars. It was the first robotic roving vehicle to be sent to the planet Mars. Sojourner weighs 11.0 kg (24.3 lbs.) on Earth (about 9 lbs. on Mars) and is about the size of a child's wagon. It has six wheels and could move at speeds up to 0.6 meters (1.9 feet) per minute. The mission landed on Mars on July 4th, 1997. Pathfinder not only accomplished this goal but also returned an unprecedented amount of data and outlived its primary design life.
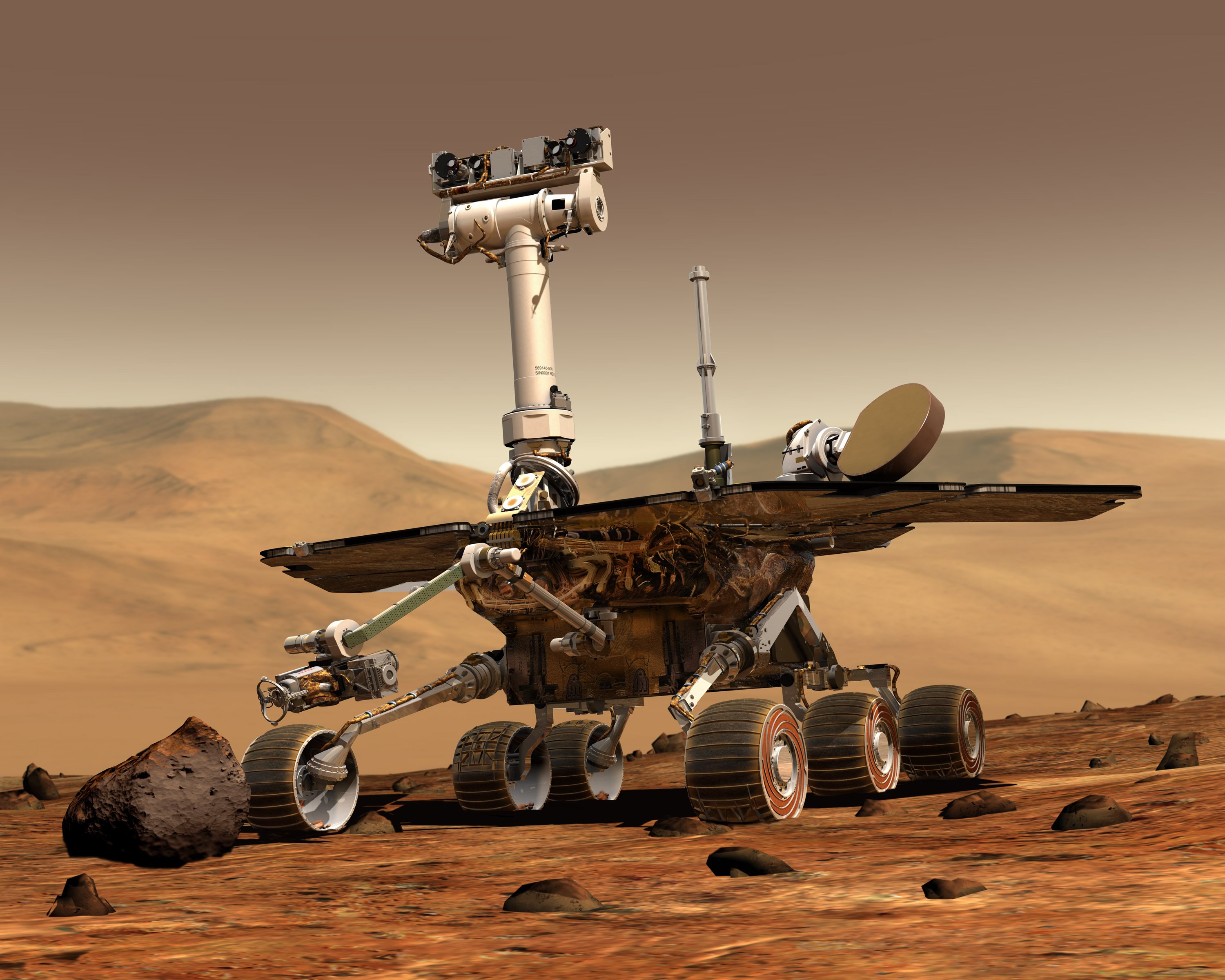
Spirit and Opportunity
The Mars Exploration Rovers (MERs), Spirit and Opportunity, were sent to Mars in the summer 2003 and landed there in January 2004. Their mission was to search for and characterize a wide range of rocks and soils that hold clues to past water activity on Mars in hopes that a manned mission may someday follow. Although initially planned for a lifespan of 90 days, the elapsed mission time surpassed six years, discovering unimaginable amounts of geological information about Mars.
Space Shuttle Robotic Arm
When NASA scientists first began the design for the space shuttle, they realized that there would have to be some way to get the enormous, but fortunately weightless, cargo and equipment into space safely and efficiently. The remote manipulator system (RMS), or Canadarm, made its first flight into space on November 13, 1981.
The arm has six joints, designed to simulate the joints of the human arm. Two are in the shoulder, one is at the elbow, and three are in the highly dextrous wrist. At the end of the wrist is an end effector which can grab or grapple the desired payload. In the weightless environment of space, it can lift more than 586,000 pounds and place it with incredible accuracy. Its total weight on earth is 994 lbs.
The RMS has been used to launch and rescue satellites and has proven itself invaluable in helping astronauts repair the Hubble Space Telescope. The Canadarm’s final shuttle mission took place in July of 2011, marking the 90th time it was used on a shuttle mission.

Mobile Servicing System
A similar device to the RMS, the Mobile Servicing System (MSS) otherwise known as Canadarm2 was designed to provide manipulation functions for the International Space Station. The MSS is responsible for servicing payloads and instruments attached to the International Space Station, while also assisting with the transport of supplies and equipment around the station.

Dextre
As part of the Space Shuttle mission STS-123 in 2008, the shuttle Endeavour carried the final part of the Special Purpose Dexterous Manipulator, or "Dextre."
Dextre is a robot with two smaller arms. It is capable of handling the delicate assembly tasks currently performed by astronauts during spacewalks. Dextre can transport objects, use tools, and install and remove equipment on the space station. Dextre also is equipped with lights, video equipment, a tool platform, and four tool holders. Sensors enable the robot to "feel" the objects it is dealing with and automatically react to movements or changes. Four mounted cameras enable the crew to observe what is going on.
Dextre's design somewhat resembles a person. The robot has an upper body that can turn at the waist and shoulders that support arms on either side.

Robots in Education
The field of robotics has become an exciting and accessible tool for teaching and supporting science, technology, engineering, mathematics (STEM), design principles, and problem solving. Robotics enables students to use their hands and minds to create like an engineer, artist, and technician does, all at once. It allows for instantaneous application of scientific and mathematical principals.
In today's education system with its budgetary constraints, middle and high schools are on a constant search for cost-effective exciting ways to deliver high-impact programs that integrate technology with multiple disciplines while preparing students for careers in the twenty-first century. Educators quickly see the advantages that robotics projects and curriculum provide by linking in a cross-curriculum method with other disciplines. Additionally, robotics can provide more affordability and reusability of equipment as compared to other prepackaged options.
Today more than ever, schools are adopting robotics in the classroom to revitalize curriculum and meet ever increasing academic standards required for students. Robotics not only has a unique and broad appeal throughout various teaching fields, but it is quite possibly the technical field that will have the largest influence upon our society throughout the next century.
Why is Robotics Important?
As we saw in the uses and examples of robotics section, robotics is an emerging field with applications in many facets of our lives. It is important for all members of society to have an understanding of the technology that surrounds us. However, robotics is important for more than that reason. Robotics provides a unique combination of the pillars of STEM: science, technology, engineering and math. When taught in schools, it allows students to experience a true interdisciplinary lesson while studying a cutting edge and exciting topic. Also, the aesthetics which go into the design and creation of robots allow students to experiment with an artistic side, while working through technical principals. This combination rewards participants on a plethora of different learning levels.