One of the most important concepts in design is that of systems integration. It was discussed earlier how a design is often divided into subsystems. Systems integration refers to the way that these individual subsystems are combined during the design process into one cohesive product. This is not something that happens at the end of the design process after each subsystem has been designed, but rather something that is integral to the process. Ideally each subsystem works well and supports the other subsystems of the robot in a way that the whole becomes greater than the sum of the parts. During the design process, it is important to think about the ways each subsystem will affect and interface with each of the others.
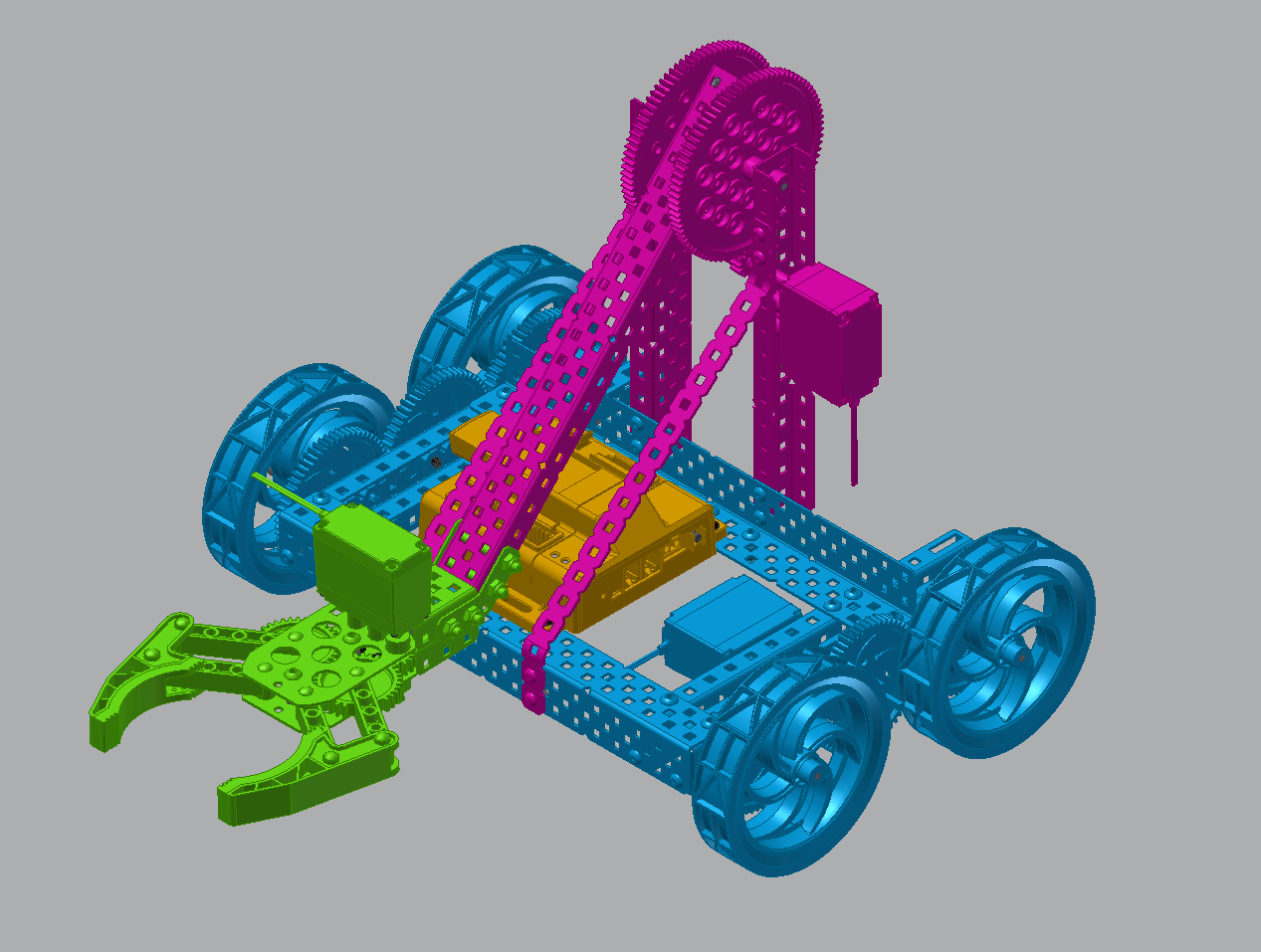
In competitive robotics the robots are typically divided down into subsystems that perform different functions. Some of these systems will stretch throughout the robot while others will consist of only a single mechanism. An example list of subsystems is shown below:
- Power
- Control
- Sensors
- Pneumatics
- Drivetrain
- Lifting Mechanism
- Object Manipulator
Each of these subsystems could be designed independently, but each is dependent on all the others. In order for the overall robot to function effectively, each of these systems must work together. In order to design any one of these systems, one must have knowledge of the others. Each of these subsystems will have its own individual design process as part of the overall design process; any requirements on the way the subsystems interact as part of the systems integration would be treated as Specifications (design constraints) in Step 3 of the design process described in Unit 1.
For example, if the robot has a maximum size requirement, each subsystem may need to nest together such that the overall system “fits in the box.” In this scenario each subsystem may be given a specified amount of “robot real estate” that it must stay within and specified ways they would interface with the others. For example, the claw must start within an imaginary 3” x 3” x 5” tall box located at the very front of the robot. It is 2” off the ground, and it attaches to the robot arm at the lower, rear center of this imaginary box using a specified hole pattern.
Tips for Integration:
Whatever types of subsystems are being integrated, it is important to keep several things in mind. Remembering these basic principles will help create a better overall system.
- Look for changes that can be made to the individual subsystems that will improve the performance of the overall system. (For instance, a simple “funnel” design in the front of the chassis of the drivetrain subsystem could significantly improve the performance of an accumulator collection subsystem.)
- Try to reduce components used wherever possible. If possible, share components between subsystems.
- Try to utilize components that can provide multiple functions in the overall robot system.
- Design the system so that it can be easily assembled, disassembled, and maintained.
- Design the system so that it requires fewer motors. Try to share motors if possible.
- Improve the speed of the overall system. Speed is often the measure of effectiveness.
By remembering these tips it is possible to create a well functioning overall system. System Integration is best performed throughout the entire robot design process.