Unit 1 – Introduction to Engineering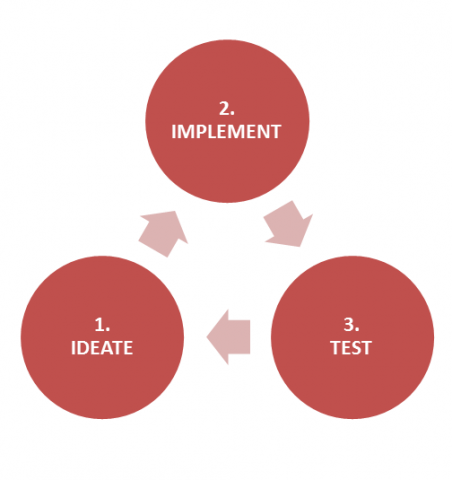 This unit will teach students the answer to the question “What IS engineering?” Students will learn what engineers do, what different types of engineers there are, and what tools they use. This unit will get students started on their engineering notebook which they will use throughout the semester to document their progress.
This unit will teach students the answer to the question “What IS engineering?” Students will learn what engineers do, what different types of engineers there are, and what tools they use. This unit will get students started on their engineering notebook which they will use throughout the semester to document their progress.
Objectives:
- Students will understand what engineering is, and be able to demonstrate knowledge of what engineers do.
- Students will be able to list different types of engineering disciplines and their applications in society.
- Students will be able to successfully utilize the engineering design process to methodically solve problems.
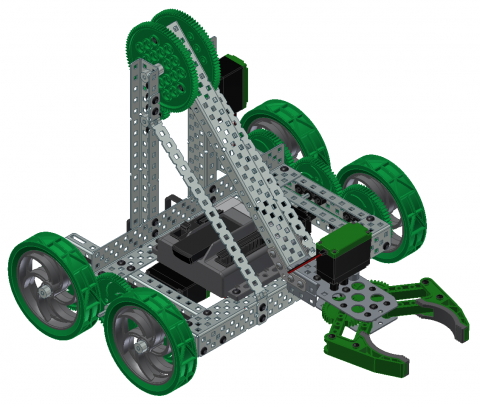
Unit 2 – Introduction to Robotics In this unit students will learn about robotics in our world, and how ALL the different aspects of STEM are all used in the field of robotics. This unit will also provide an introduction to the VEX Robotics Design System; students will get an overview of the different subsystems within the VEX system and how they interact together. Students will then put this knowledge into practice as they follow step-by-step directions to build their first robot.
In this unit students will learn about robotics in our world, and how ALL the different aspects of STEM are all used in the field of robotics. This unit will also provide an introduction to the VEX Robotics Design System; students will get an overview of the different subsystems within the VEX system and how they interact together. Students will then put this knowledge into practice as they follow step-by-step directions to build their first robot.
Objectives:
- Students will demonstrate knowledge of the basic components and subsystems of a robot.
- Students will be able to list examples of robots found in the real world.
- Students will understand the fundamental subsystems and components found in the VEX Robotics Design System.
- Students will be able to construct robotic assemblies using the VEX Robotics Design System.
Unit 3 – Introduction to VEXnet In this unit students will learn about the core components of the VEX control system - the Cortex Microcontroller, VEXnet Joystick and 802.11 VEXnet Wireless link. Students will then get the opportunity to use their previously built robots to compete in a head-to-head challenge against their classmates.
In this unit students will learn about the core components of the VEX control system - the Cortex Microcontroller, VEXnet Joystick and 802.11 VEXnet Wireless link. Students will then get the opportunity to use their previously built robots to compete in a head-to-head challenge against their classmates.
Objectives:
- The students will be able to explain what the specific components of the VEXnet System can do and how they are used to control the robot.
- The students will be able to set up their microcontroller to function in both autonomous and drive controlled modes.
- The students will be able to use the VEXnet system to successfully control their robot in a classroom challenge.
Unit 4 – Introduction to Autodesk® Inventor®
 In this unit students will get an introduction to Autodesk® Inventor®.
In this unit students will get an introduction to Autodesk® Inventor®.
They will get an overview of the different ways engineers use Autodesk® Inventor®, then learn specific ways they can use Inventor to help design and build VEX robots.
Objectives:
- The students will be able to create 3D models using Autodesk® Inventor®.
- The students will be able to animate 3D models.
- The students will be able to render 3D models.
Unit 5 – THE GAME!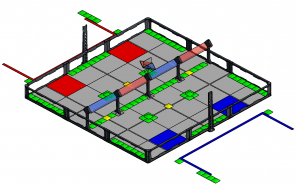 In this unit students will be presented with a game (typically the VRC game of the current competition season). They will split into teams and spend the rest of the semester designing a robot which can play this game head-to-head against the robots built by their classmates.
In this unit students will be presented with a game (typically the VRC game of the current competition season). They will split into teams and spend the rest of the semester designing a robot which can play this game head-to-head against the robots built by their classmates.
This robot build will follow the engineering design process discussed in Unit 1. The first step in this process is analyzing the design challenge placed in front of them and deciding what they want their robot to do.
Objectives:
- The students will be able to explain how the process of strategic design works.
- The students will be able to demonstrate the use of defining objectives to select game objectives.
- The students will be able to list all of the ways to score the most points in the game.
- The students will be able to create a cost – benefit analysis to demonstrate the strengths of different tasks.
Unit 6 – Object Manipulation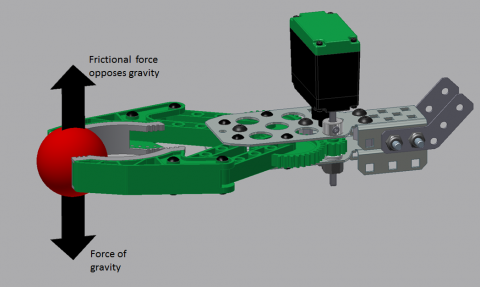 In this unit, students will learn about the different types and categories of robot manipulators. Students will be presented with robot manipulators from the real world, and shown the basic principles behind their operation. Students will then create their own object manipulator for use on their competition robot.
In this unit, students will learn about the different types and categories of robot manipulators. Students will be presented with robot manipulators from the real world, and shown the basic principles behind their operation. Students will then create their own object manipulator for use on their competition robot.
Objectives:
- The students will be able to demonstrate the basic concepts of manipulators, and accumulators.
- The students will be able to design examples of manipulators, and accumulators.
Unit 7 – Speed, Power, Torque & DC Motors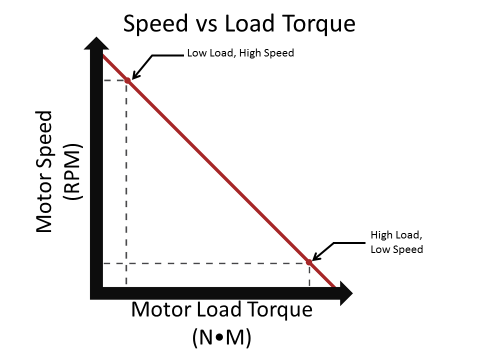 In this unit, students will learn about the physical principles of speed, power, and torque. They will also learn about DC motors and how these principles apply to them. Students will apply these concepts on a sample mechanical system to calculate key details of the design.
In this unit, students will learn about the physical principles of speed, power, and torque. They will also learn about DC motors and how these principles apply to them. Students will apply these concepts on a sample mechanical system to calculate key details of the design.
Objectives:
- The students will be able to demonstrate the concept of speed.
- The students will be able to demonstrate the concept of power.
- The students will be able to demonstrate the concept of torque.
- The students will be able to describe the 4 primary characteristics of a DC Motor, and how they relate to each other.
- The students will be able to calculate motor loading for a mechanical DC Motor system, and describe how changes in the system would affect the loading.
Unit 8 – Mechanical Power Transmission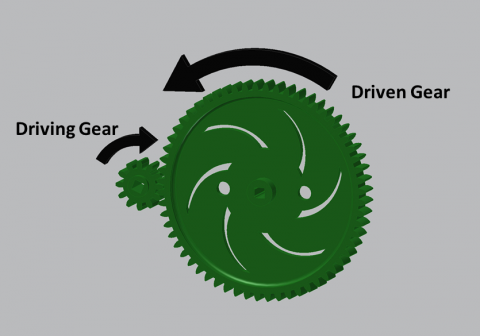 In this lesson students will learn about the different types of mechanical power transmission. They will learn about different gear types, and how to calculate gear ratios. These principles will then be applied to the types of motor - arm systems seen in Unit 7.
In this lesson students will learn about the different types of mechanical power transmission. They will learn about different gear types, and how to calculate gear ratios. These principles will then be applied to the types of motor - arm systems seen in Unit 7.
Objectives:
- The students will be able to demonstrate how mechanical power transmission systems are very important in the design and construction of competition robots.
- The students will be able to vary the gear ratio (and the mechanical advantage) in a system gives them the versatility necessary to accomplish whatever work needs to be done.
- The students will be able to determine gear inputs & outputs by calculating the difference between them, and determine their gear ratio accordingly.
Unit 9 – Drivetrain Design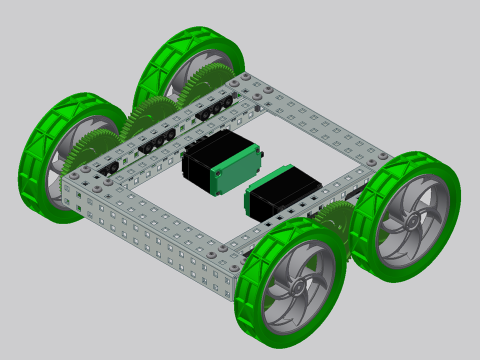 In this unit students will be exposed to the physical principles of friction & traction while exploring the implications these principles have on robot drivetrain design. Students will be shown a variety of different robot drive system types and will learn the differences between them. Students will then apply the lessons they’ve previously learned about DC motors & gear ratios to design the powertrain of their robot’s drive system.
In this unit students will be exposed to the physical principles of friction & traction while exploring the implications these principles have on robot drivetrain design. Students will be shown a variety of different robot drive system types and will learn the differences between them. Students will then apply the lessons they’ve previously learned about DC motors & gear ratios to design the powertrain of their robot’s drive system.
Objectives:
- The students will be able to demonstrate how applied force and friction are related.
- The students will be able to distinguish between static and kinetic friction.
- The students will be able to calculate wheel speed.
- The students will be able to demonstrate how to calculate a gear reduction.
- The students will be able to compare and contrast the different types of drivetrains, along with their benefits and drawbacks.
Unit 10 – Lifting Mechanisms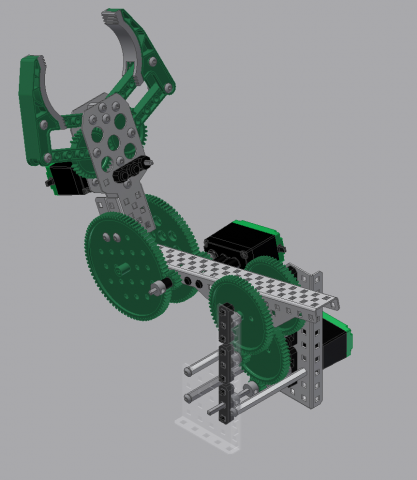 In this unit students will learn about different types of lifting mechanisms which are useful on competition robots. Students will then do preliminary design work on a mechanism for their robots.
In this unit students will learn about different types of lifting mechanisms which are useful on competition robots. Students will then do preliminary design work on a mechanism for their robots.
Objectives:
- The students will be able to differentiate the three degrees of freedom that are presented in the beginning of the unit.
- The students will be able to demonstrate the correct use of the calculations needed to choose a gear reduction.
- The students will be able to distinguish between the use of a linkage system and a multi state elevator in manipulator design.
- The students will be able to explain how passive assistance can improve a robot design.
Unit 11 – Systems Integration In this unit students will learn techniques for successfully integrating a number of disparate subsystems into one cohesive whole. Students will take the lessons learned earlier in the semester and their existing designs to create their overall robot.
In this unit students will learn techniques for successfully integrating a number of disparate subsystems into one cohesive whole. Students will take the lessons learned earlier in the semester and their existing designs to create their overall robot.
Objectives:
- The students will be able to demonstrate how system integration works.
- The students will be able to demonstrate how they can use the six tips for integration in their design.
Unit 12 – Testing, Iteration & Continuous Improvement In this unit students will test and improve their robot. All design is iterative. This phase of the semester will focus on students testing, tweaking, and improving their robot as they hone in on a final design. Students will then compete in a final competition against their peers.
In this unit students will test and improve their robot. All design is iterative. This phase of the semester will focus on students testing, tweaking, and improving their robot as they hone in on a final design. Students will then compete in a final competition against their peers.
Objectives:
- The students will be able to demonstrate the role that testing plays in the design process.
- The students will be able to demonstrate how the information collected in the testing process is used in the different iterations of their robot design.
- The students will be able to demonstrate a systematic process to prioritize the improvements dictated from the data collected from their testing.
Unit 13 – Designing Custom Components [OPTIONAL] In this optional unit, students will use Autodesk® Inventor® to design and model their own custom part for addition onto their robot. If possible, students will utilize rapid prototyping to create their part and implement it onto their robot before testing its efficacy.
In this optional unit, students will use Autodesk® Inventor® to design and model their own custom part for addition onto their robot. If possible, students will utilize rapid prototyping to create their part and implement it onto their robot before testing its efficacy.
Objectives:
- The students will be able to create custom 3D models using Autodesk® Inventor®.
- The students will be able to animate 3D models.
- The students will be able to render 3D models.