The VEX Robotics Design System, which was created by Innovation First, Inc., is recognized as a leading classroom robotics platform. It has been designed to nurture creative advancement in robotics and knowledge of science, technology, engineering, and math (STEM) education. The VEX system provides teachers and students with an affordable, robust, and state-of-the-art robotics system suitable for both classroom use and for use on the competition playing field. VEX’s innovative use of premade and easily formed structural metal, combined with a powerful and user-programmable microprocessor for control, leads to infinite design possibilities.
Beyond science and engineering principles, a VEX Robotics project encourages teamwork, leadership and problem solving among groups. It also allows educators to easily customize projects to meet the level of students’ abilities. The affordable VEX platform is expanding rapidly and is now found in middle schools, high schools and university labs around the globe.
For more information on the VEX Robotics Design System, please visit: https://www.vexrobotics.com/
VEX Product Subsystems
Structure Subsystem
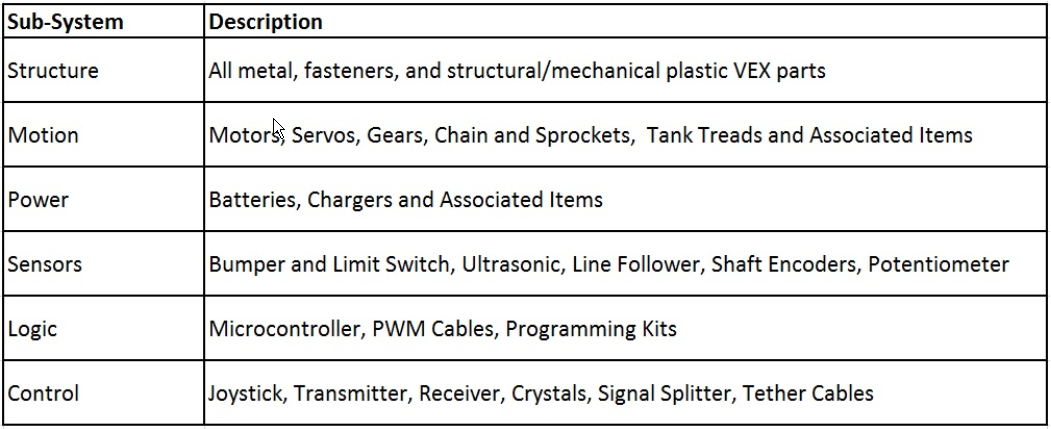
The parts in the VEX Structure Subsystem form the base of every robot. These parts are the “skeleton” of the robot to which all other parts are attached. This subsystem consists of all the main structural components in the VEX Robotics Design System, including all the metal components and hardware pieces. These pieces connect together to form the “skeleton” or frame of the robot. The Structure and Motion subsystems are very tightly integrated to form the chassis of the robot.
In the VEX Robotics Design System the majority of the components in the Structure Subsystem are made from bent aluminum or steel sheet metal. These pieces come in a variety of shapes and sizes and are suited to different applications on a robot.
The VEX structural pieces all contain square holes (0.182” sq) on a standardized 0.5” grid. This standardized hole-spacing allows for VEX parts to be connected in almost any configuration. The smaller diamond holes are there to help users cut pieces using tin snips or fine toothed hacksaws without leaving sharp corners.
VEX square holes are also used as an alignment feature on some components. These pieces will snap into place in these square holes. For example, when mounting a VEX Bearing Flat there are small tabs which will stick through the square hole and hold it perfectly in alignment. Note that hardware is still required to hold the Bearing Flat onto a structural piece!

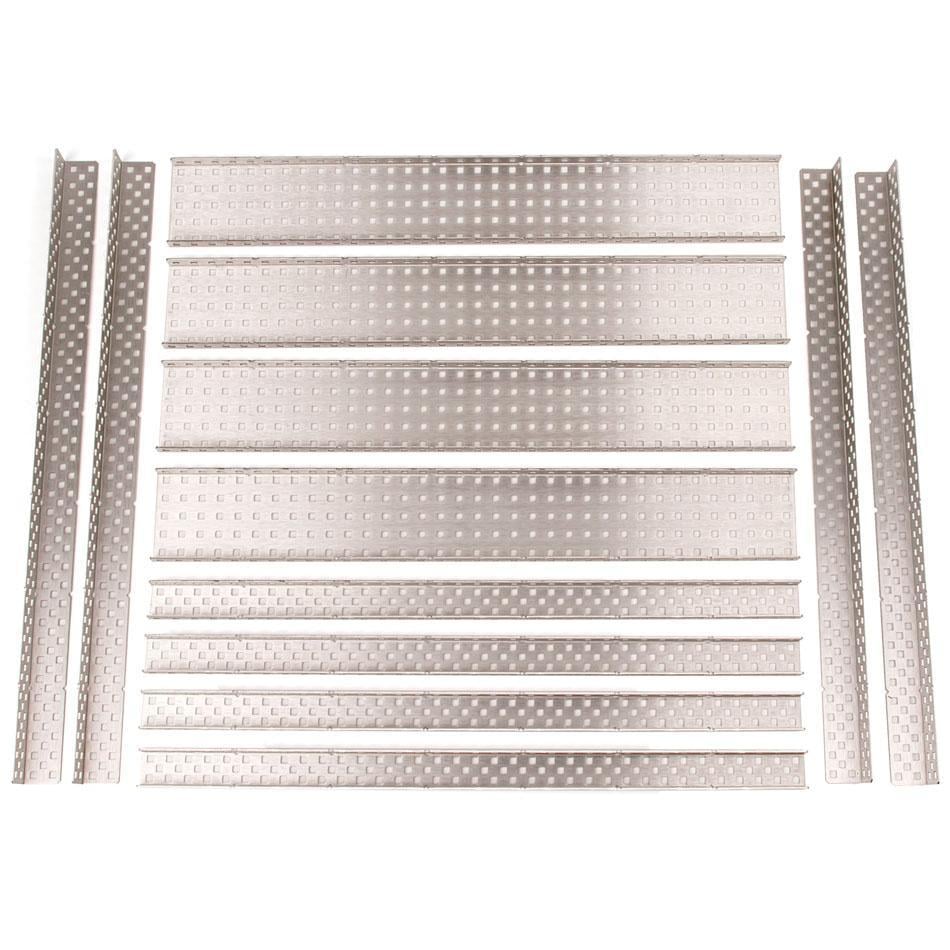
Hardware is an important part of the Structure Subsystem. Metal components can be attached together using the 8-32 screws and nuts which are standard in the VEX kit. These screws come in a variety of lengths and can be used to attach multiple thicknesses of metal together, or to mount other components onto the VEX structural pieces. Allen wrenches and other tools are used to tighten or loosen the hardware. There are also smaller 6-32 screws in the VEX Robotics Design System, which are used only for the mounting of VEX Motors and Servos.

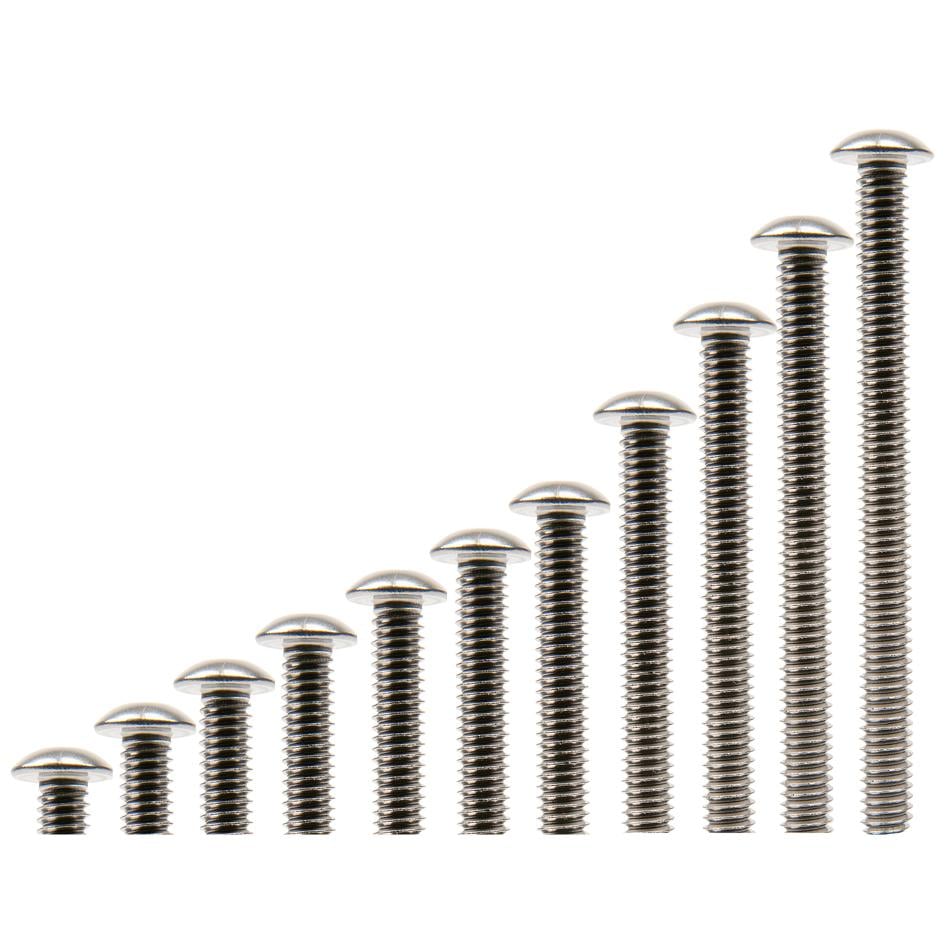
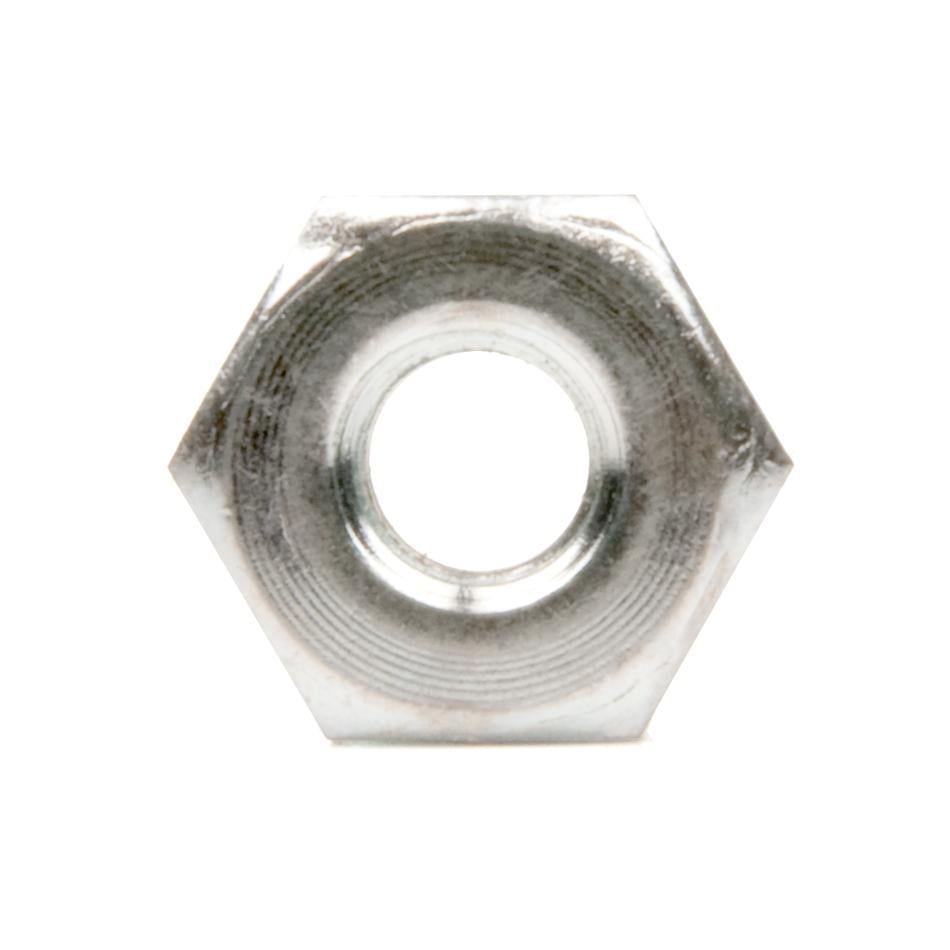
When using screws to attach things together, there are three different nuts which can be used.
- Nylock nuts have a plastic insert which will prevent the screw from loosening. These nuts are harder to install; an open-ended wrench is needed to tighten them. However, these nuts will not shake loose due to vibration or movement.
- KEPS nuts have a ring of teeth on one side of them which will grip the piece they are being installed on. An open-ended wrench is not needed to tighten them, but it is recommended. These nuts are installed with the teeth facing the structure. They can loosen up over time if not properly tightened, but they work well in most applications.
- Regular nuts that have no locking feature. These basic hex nuts require a wrench to install and may loosen up over time, especially as a result of vibration or movement. They are thin and can be used in certain applications where a Nylock or KEPS nut would not fit.

Another useful structural component are the 8-32 threaded standoffs; these standoffs come in a variety of lengths and add a great deal of versatility to the VEX kit. Standoffs are useful for mounting components as well as for creating structural beams of great strength.

One of the key features of many VEX structural parts is their “bend-able” and “cut-able” nature. Users can easily modify many of these structural parts into new configurations better suited for their current needs. These parts were designed to be modified!
Motion Subsystem
The Motion Subsystem comprises all the components in the VEX Robotics Design System which make a robot move. These components are critical to every robot. The Motion Subsystem is tightly integrated with the components of the Structure Subsystem in almost all robot designs. In the VEX Robotics Design System the motion components are all easily integrated together. This makes it simple to create very complex systems using the basic motion building blocks.
The most fundamental concept of the Motion Subsystem is the use of a square shaft. Most of the VEX motion components use a square hold in their hub which fits tightly on the square VEX shafts. This square hole / square shaft system transmits torque without using cumbersome collars or clamps to grab a round shaft.
The square shaft has rounded corners which allow it to spin easily in a round hole. This allows the use of simple bearings made from Delrin. The Delrin bearing will provide a low friction piece for the shafts to turn in.
These VEX Delrin bearings come in two types, the most common of which is a Bearing Flat. The Bearing Flat mounts directly onto a piece of VEX structure and supports a shaft which runs perpendicular and directly through the structure. Another type of bearing is a Bearing Block; these are similar to the “pillow-blocks” used in industry. The Bearing Block mounts on a piece of structure and supports a shaft which is offset above, below, or to the side of the structure. Some bearings can be mounted to VEX structural components with Bearing Pop Rivets. These rivets are pressed into place for quick mounting. These Rivets are removable; pull out the center piece by pulling up on the head of the Rivet to get it to release.


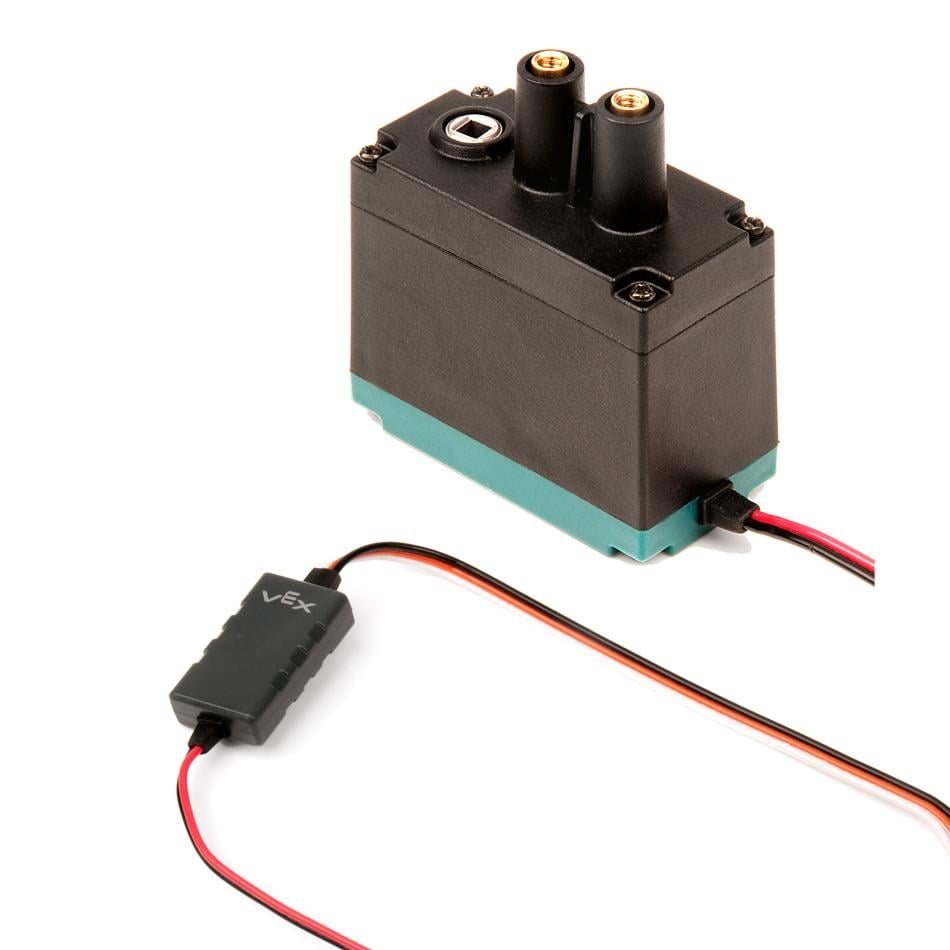
The key component of any motion system is an actuator (an actuator is something which causes a mechanical system to move). In the VEX Robotics Design System there are several different actuator options. The most common types are the VEX Continuous Rotation Motors and VEX Servos. The Motors can rotate infinitely, while the range of rotation of the Servos is restricted to 150 degrees. Each VEX Motor & Servo comes with a square socket in its face, designed to connect it to the VEX square shafts. By simply inserting a shaft into this socket it is easy to transfer torque directly from a motor into the rest of the Motion Subsystem.

The Motion Subsystem also contains parts designed to keep pieces positioned on a VEX shaft. These pieces include washers, spacers, and shaft collars. VEX Shaft Collars slide onto a shaft, and can be fastened in place using a setscrew.
There are several ways to transfer motion in the VEX Robotics Design System. A number of Motion Subsystem accessory kits are available with a variety of advanced options, including spur gears, sprocket & chains, bevel gears, etc. For a full listing of what is available, please visit: https://www.vexrobotics.com/products/accessories/motion
The VEX Motion Subsystem also contains a variety of components designed to help make robots mobile. This includes a re variety of wheels, tank treads and other options. . For a full listing of what is available, please visit: https://www.vexrobotics.com/products/accessories/motion
Power Subsystem
Power is vital to the operation of all the electronic parts on the robot, including the controller and the motors. With the structural subsystem as the robot’s skeleton, and the motion subsystem as the muscle, the power subsystem is the circulatory system that provides the rest of the robot with energy.
There are two major power considerations for a VEX robot; robot power and joystick power. The robot is powered by a rechargeable 7.2V battery pack. The VEXnet Joystick is powered by 6 AAA batteries. For more information on all the power options and accessories available, please visit: https://www.vexrobotics.com/products/accessories/power


Sensors Subsystem
The sensor subsystem gives the robot the ability to detect various things in its environment. The sensors are the “eyes and ears” of the robot, and can even enable the robot to function independently of human control. A robot senses its environment and adjusts its own behaviors based on that knowledge. A sensor will generally tell the robot about one very simple thing in the robot’s environment, and the robot’s program will interpret that feedback to determine how it should react.
There are a myriad of sensor options available in the VEX Robotics Design System. Some of these include ultrasonic range finders, gyroscopes, light sensors and optical encoders. For a full list of all sensors available, please visit: https://www.vexrobotics.com/products/accessories/sensors

Logic Subsystem
The Logic Subsystem major component is one of the VEX Microcontrollers. A microcontroller is the most integral component of the entire VEX system, because it coordinates and controls all the other components. The Logic Subsystem is effectively the robot’s brain.

The VEX Cortex Microcontroller comes preprogrammed with a default routine which allows users to get their robots up and running as quickly as possible. With the use of jumper pins, quick adjustments can be made to this default code for greater flexibility. For more advanced programming options, the microcontroller can be fully user programmed using one of the available programming options. More information on these options can be found here: https://www.vexrobotics.com/products/programming
Control Subsystem
The Control Subsystem enables a human operator to maneuver the robot. Commands are issued through joysticks and buttons on the VEXnet Joystick, and sent wirelessly to the robot. In this way, the robot can be controlled through a combination of manual and autonomous methods.
The VEXnet Joystick allows a human operator to control a robot in real time using the innovative VEXnet 802.11 Wireless link. The joystick has two 2-axis analog joysticks, 4 trigger buttons and two 4-button directional pads.
