In competition robotics, it is often important to be able to collect multiple game objects at one time. This requires a specific type of object manipulator called an accumulator. An accumulator is a robot mechanism designed to pick up a large number of similar objects.
Magazines:
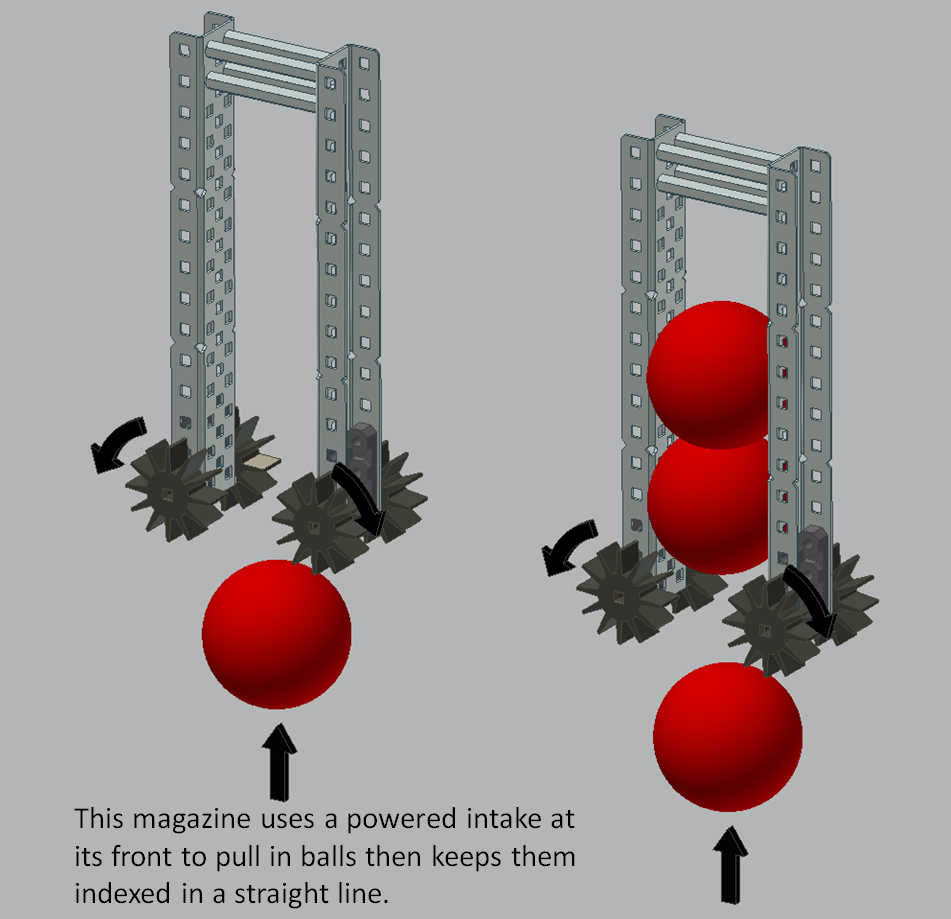
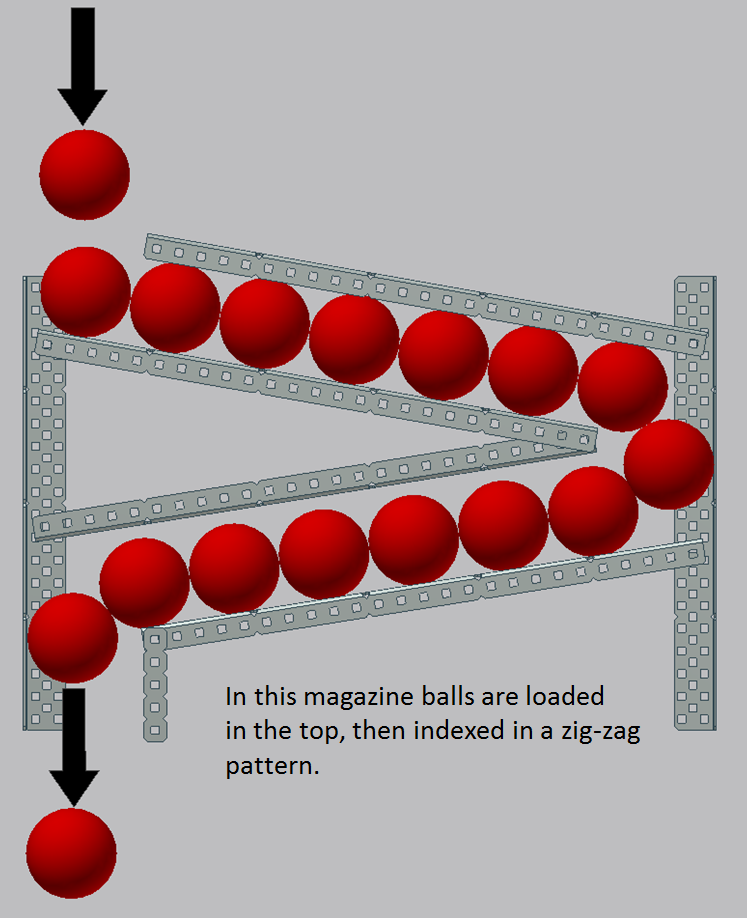
There are a few common types of accumulators. The first type is a magazine in which objects are loaded one at a time into some sort of storage area and held in a fixed orientation, in line (i.e. the first object in is the last object out). In this type of accumulator the objects are typically not actively manipulated once they are inside the storage area.
Conveyor Belts:
Another type of accumulator is a conveyor belt, which is actually a form of magazine. A conveyor belt type magazine uses some sort of belt to manipulate the objects even after they are inside. Conveyor belts are examples of frictional grabbers (they’re like roller claws that hold more than one object) since they rely on the friction between the belt and object to accumulate. More details on using conveyance as part of accumulator design will be discussed later in this unit.
It is important to note that there are two main types of conveyor belts, indexing belts, in which the belt runs only when grabbing an object to enable good sorting, and non-indexing belts in which the belt continuously runs and the objects self-sort.
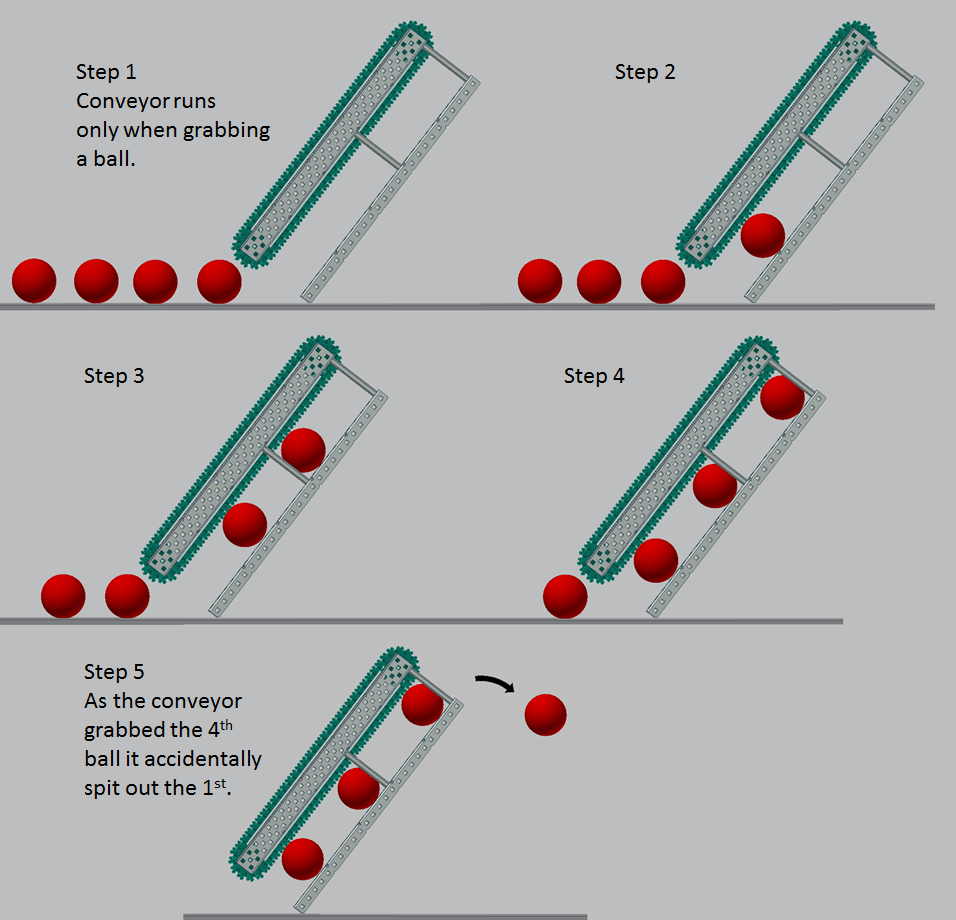
In the above examples the belt is run a little bit as each object is grabbed, this keeps the objects evenly spaced within the accumulator. This requires a high degree of control, either by the driver or by the robot’s pre-programming and sensors. If the belt runs at the incorrect time or for too long the system can jam or may end up packing the objects very inefficiently.
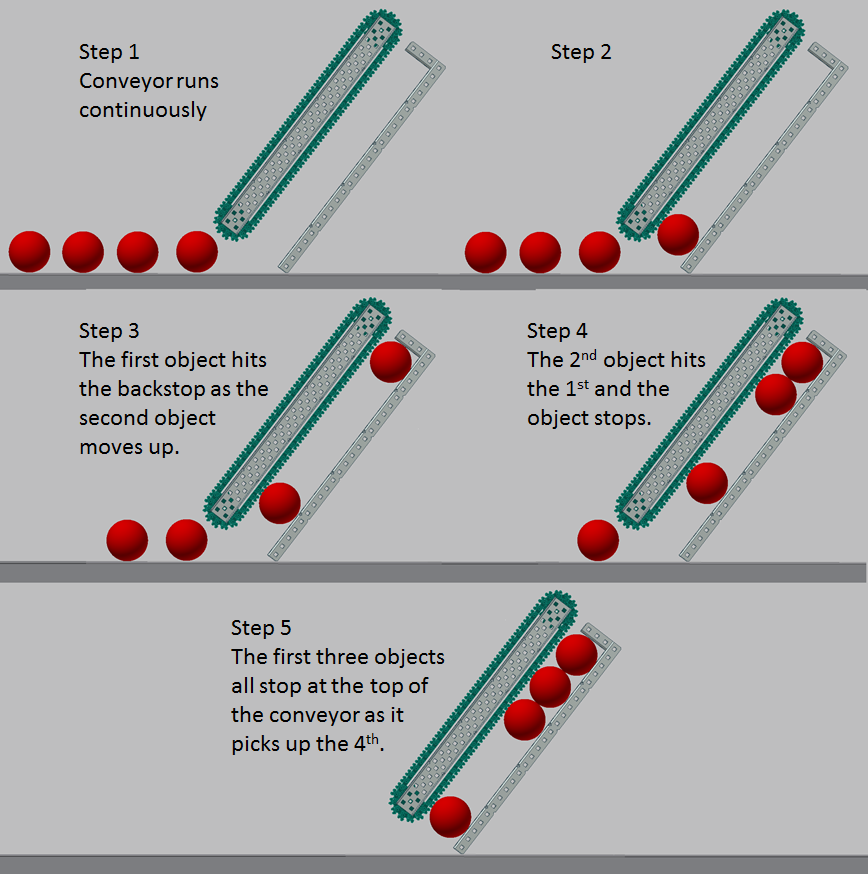
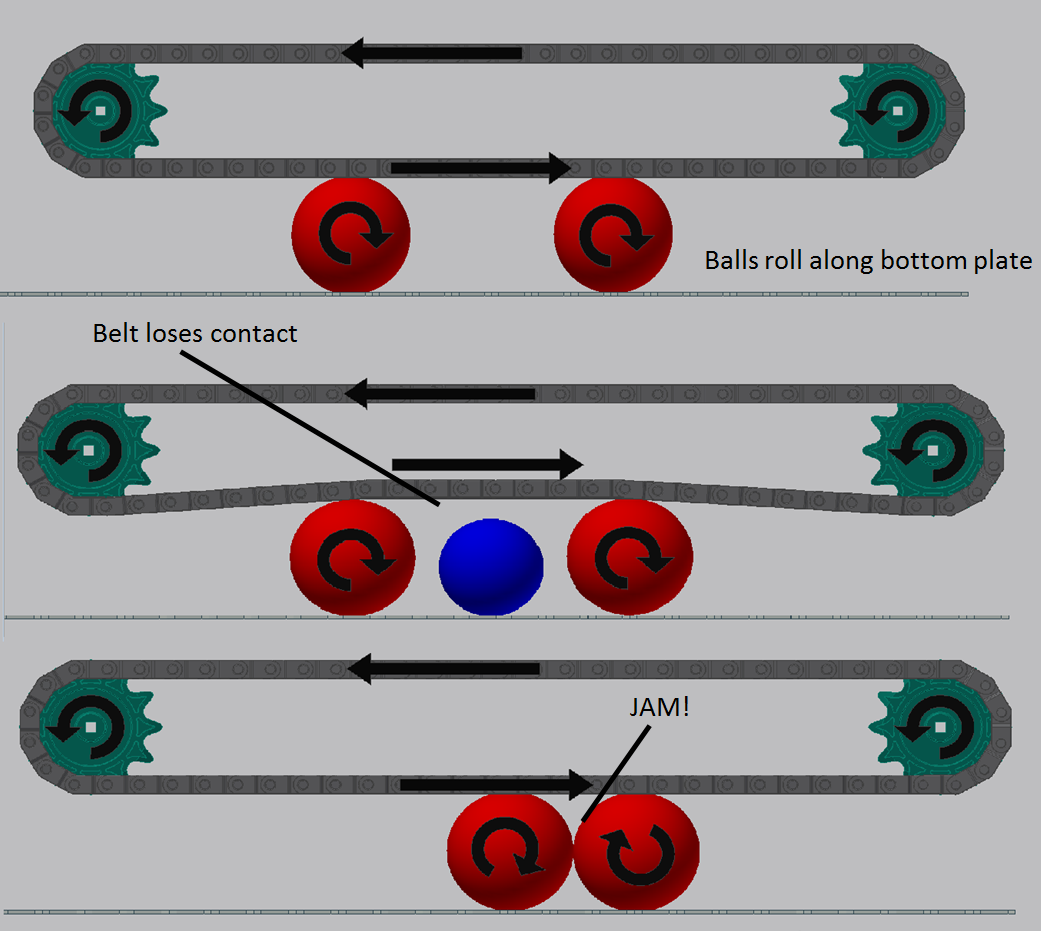
A non-indexing conveyor belt as shown above continuously runs. When the first object is grabbed it moves to the top of the belt until it hits the back of the accumulator where it hits a stop and the belts slide past it. When a second object is grabbed it moves up until it hits the first, and stops (at which point the belt now slides past both of these stationary objects). This type of accumulator is easier to use, but is more difficult to design. For this type of accumulator to function correctly the robot designer must ensure that the objects “self-sort” correctly, that is they don’t bunch up into configurations where they will jam the belts. The designer must also ensure that the frictional force between the belt and the object is enough to pull the object in, but not too much so that the belt stops when the objects are resting against the stop. Once correctly configured this type of accumulator can be very successful in competition robotics.
Hoppers:
A third type of accumulator is a simple hopper, or bin. A hopper is a large storage area in which objects are placed – it differs from a magazine in that the objects are not held in any specific orientation, they’re just thrown into a bin! As such designers of hopper type accumulators must be very careful to ensure the objects won’t jam if they end up in the wrong orientation; some shapes of objects are more appropriate for hoppers than others.
There are two types of hoppers.
Dumping hoppers are hoppers in which the way objects are released is different than the way they are gathered. One example of this is a robot can be seen below.
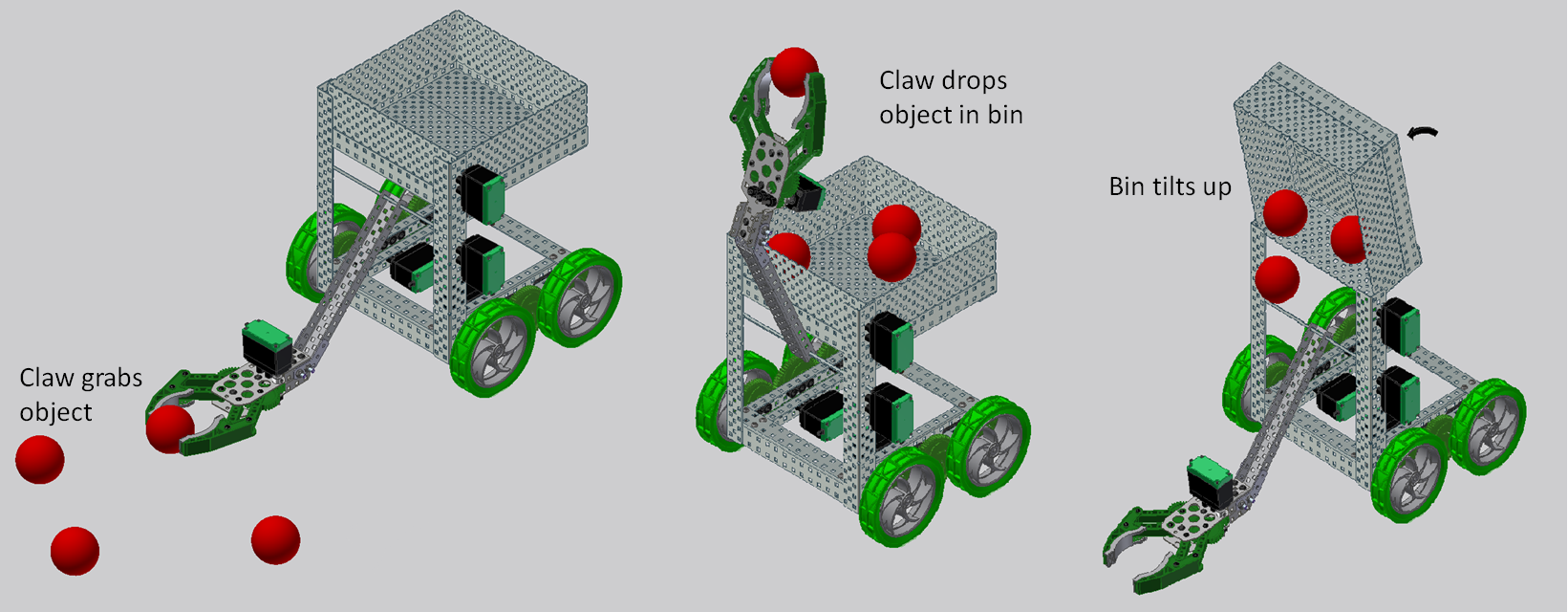
On this robot a claw arm picks up objects and dumps them into the hopper, then the hopper tilts back like a dump truck to score the objects in a goal.
Reversing hoppers are hoppers similar to magazines in which objects are released through the same mechanism with which they are gathered. An example of a reversing hopper can be seen below.
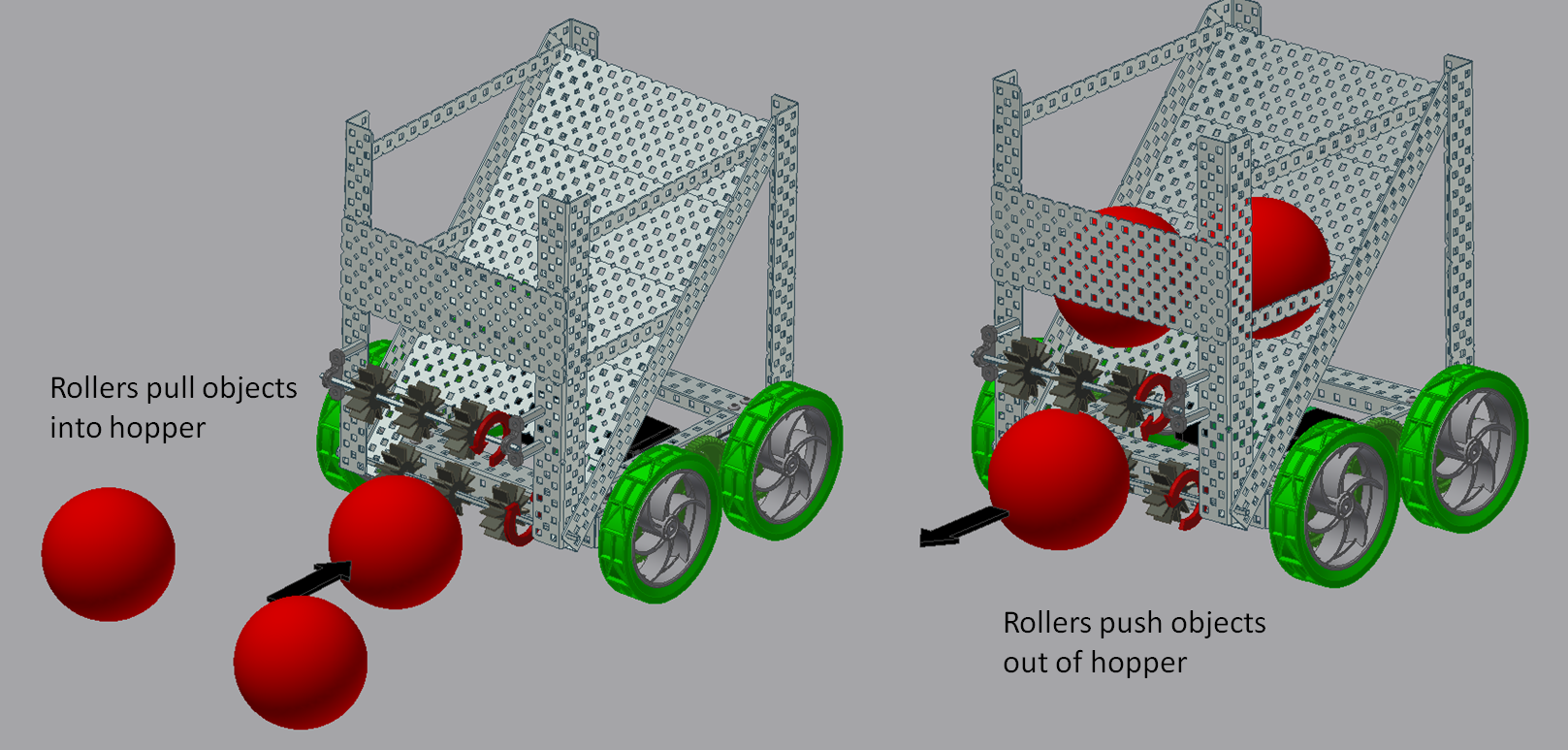
In this accumulator the objects are sucked into a large bin by two rollers. To score them the robot simply reverses the rollers and pushes the objects back out.
There are many successful designs which utilize multiple types of accumulators as part of a larger system. For example, refer to the robot below.
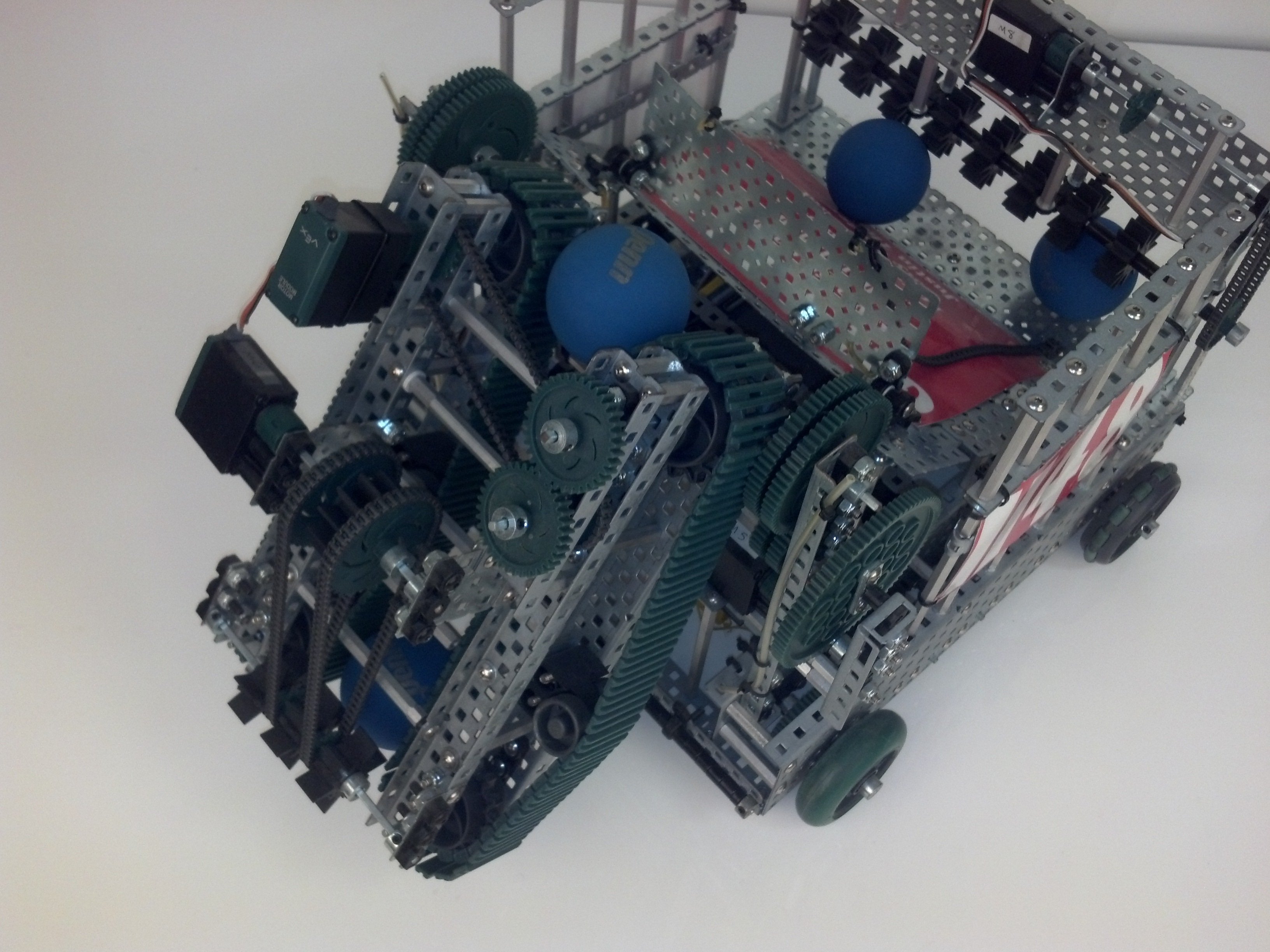
On the above robot, a non-indexing conveyor lifts up blue racquet balls off the floor and deposits them into a dumping hopper, where they are then dumped out the back through a separate roller mechanism into a goal.
Accumulator Design:
There are a number of design characteristics which are common among successful accumulators. The best competition robot accumulators will have the following characteristics:
- A wide intake “mouth” allowing for pickup over a wide area without precise robot positioning.
- A means to prevent jamming of objects after pickup.
- A high-speed intake that allows a robot to pick up an object even when it is driving at full speed.
- The ability to gather multiple objects at the same time.
- The ability to gather a large number of objects, one after another, without jamming or slowing down.
- The capability to pick up objects of various sizes.
Conveyance:
As discussed above, conveyors are very common in accumulator design and the concepts related to conveyance are important for all robot designers. There are several design characteristics of conveyor belts that are important for designers to consider.
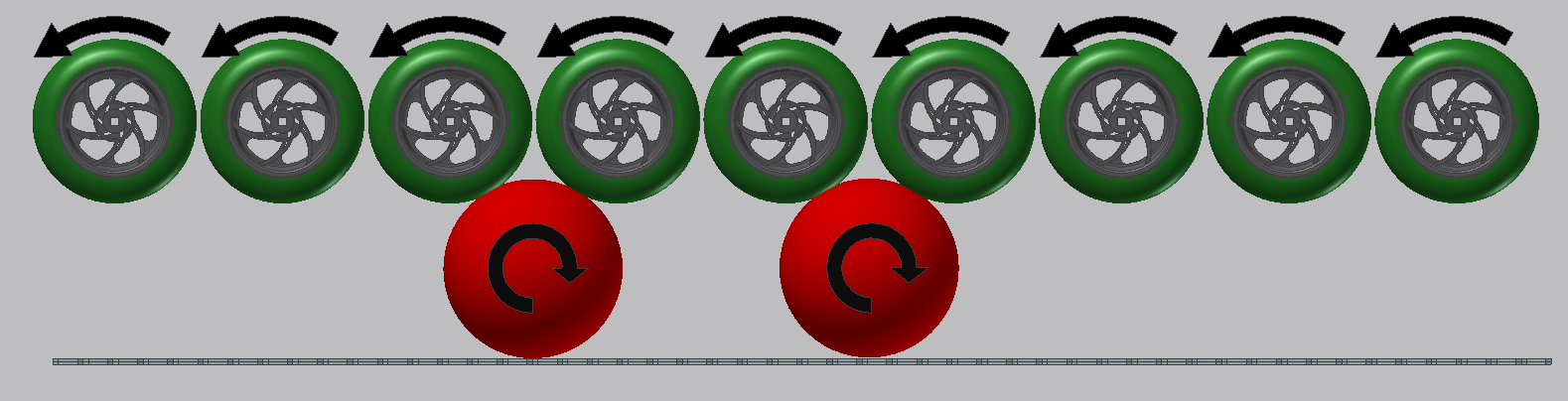
Conveyor Configuration - The configuration of the conveyor belts is a huge part of how the system behaves. There are several different types to consider. One simple configuration of this is a single conveyor belt in front of a flat wall.
In this type of conveyor, the belt contacts the balls on one side and rolls them up the opposing surface. This relatively simple setup requires only one conveyor belt. However, this setup has some disadvantages. First, since the balls are rolling, they move through the accumulator at half the speed of the conveyor belt. Second, this setup is subject to jamming if two balls are picked up too closely together and they touch inside the conveyor. Because the back side of the ball in front is moving up while the front side of the ball in back is moving down, the balls can bind up and jam. This type of system needs to be tuned very carefully to ensure that one object doesn’t push up on the belt such that it loses contact with the next object. It is difficult to ensure that the conveyor will be able to provide the correct amount of frictional force on all objects inside.
To help maintain even frictional force on all objects, a configuration with multiple independent rollers can be used.
In this setup, each of the rollers is linked to the power source. This system is less likely to jam, but is still subject to many of the problems found in the first setup. Also, using many rollers instead of a single belt adds significant complexity.
Another option is to utilize two belts.
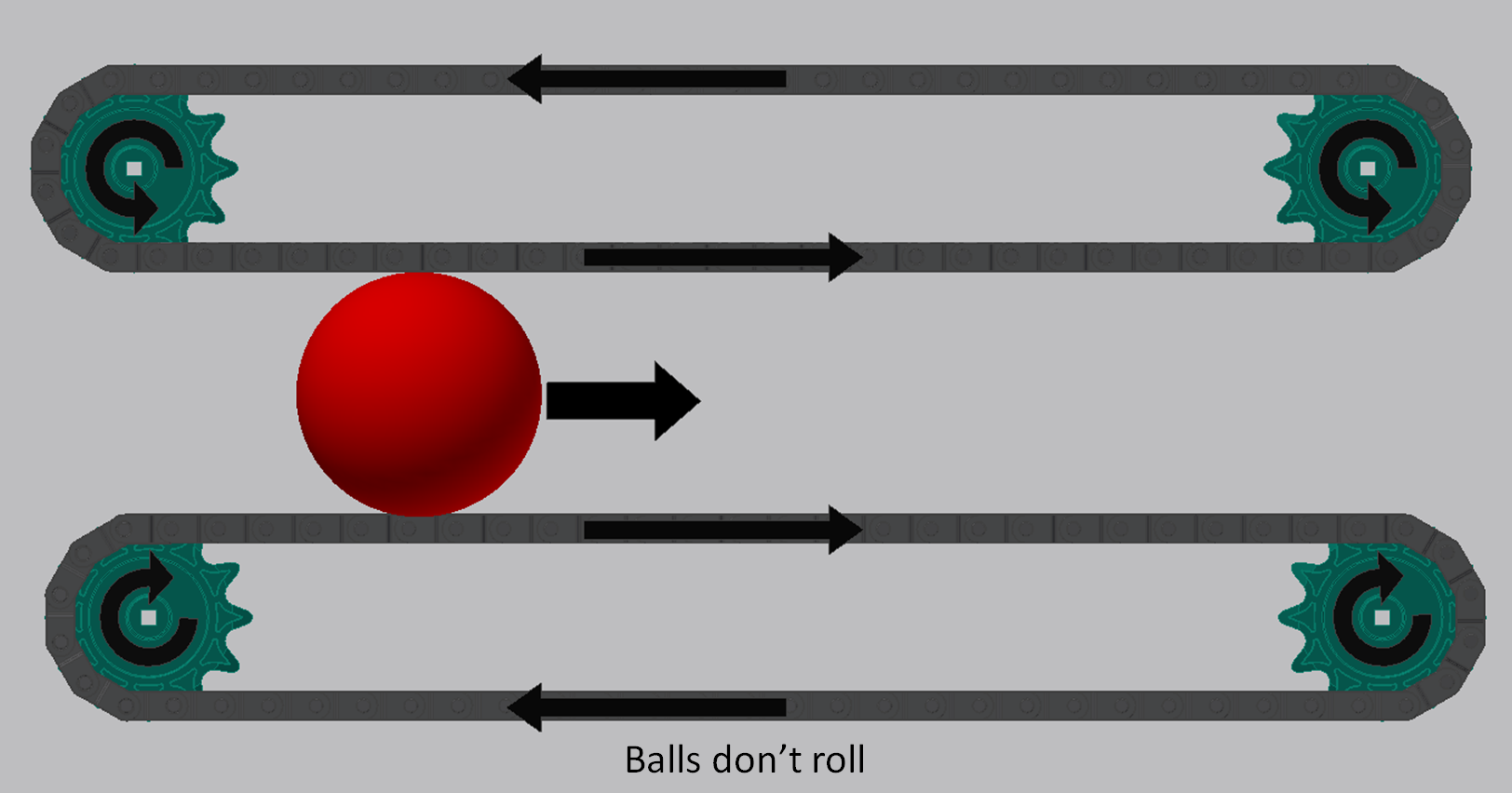
This setup is much less likely to jam since the balls no longer roll; they more in a straight line up the conveyor. If two objects do touch they are much less likely to jam. This system is still susceptible to the varying friction of objects pushing the belts apart found in the first single-belt system above, but it performs much better at the expense of having two belts.
Why not combine the best of system 2 and system 3? What about a system with rollers on both sides?
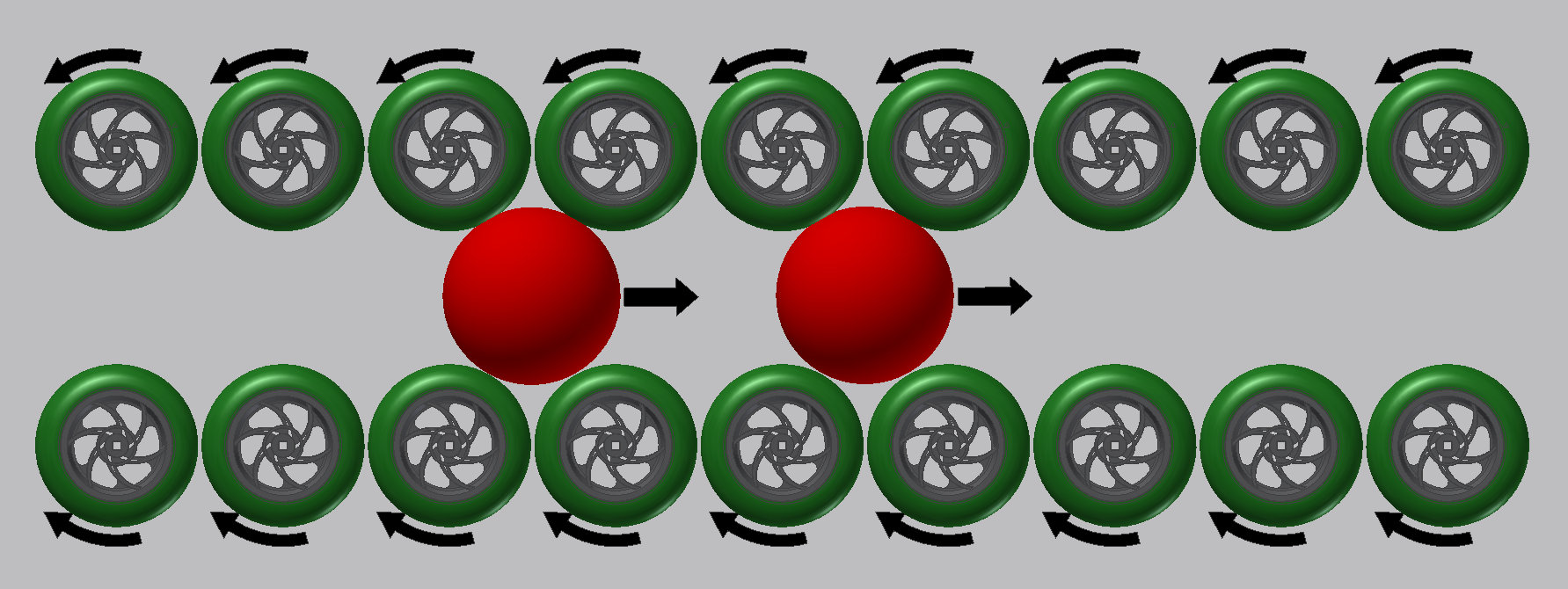
This system should prevent jamming like the double belt setup, and should also provide consistent frictional force on the objects like the single sided roller setup, however – it is MUCH more complex than the above systems.
Design is all about tradeoffs: what is the simplest solution that will solve the problem? Designers will need to choose the configuration which best works to accumulate their specific object, in the manner most relevant to their competition match needs (i.e. maybe the robot only need to pick them up one at a time, so jamming isn’t an issue).
Conveyor Gearing - Another important conveyance design consideration is the conveyor gearing. It is important to gear the accumulator appropriately. Ideally, the accumulator intake is geared so that it pulls an object in faster than the drivetrain at maximum speed. In a single-belt system, this means that the intake is geared in such a way that the linear belt speed is more than double the drivetrain's top speed. In a two-belt system, the intake's linear belt speed only needs to be more than the drivetrain's top speed. When it comes to accumulator gearing, faster is almost always better – just make sure the accumulator can overcome the friction caused by pulling in the objects. More details on this will be discussed in Units 7 & 8.
Compression & Elasticity – For belts and rollers to pull in an object, there must be some force pressing the belt onto the object. Often this force is caused by the compression or elasticity of some part of the system. Sometimes the conveyor belting bends backwards and this “spring” is what applies the force on the object. Other times, the object itself has some elasticity and deforms when it is sucked into the intake. Other times, additional elastic bands or springs are used to give the entire conveyor assembly some give, which enables it to deform when an object moves through it. In this case, the springs apply the normal force on the object. Finding the correct balance of grip on an object is sometimes difficult, especially when building an accumulator designed to pick up multiple objects at the same time – as discussed above, the conveyor configuration will play a large role in this.