In certain situations, a design may require more mechanical advantage than a single gear ratio can provide or is otherwise impractical. For example, if a VEX Robot Design requires a 12:500 gear ratio it is a problem because there is no 500-tooth gear available. In this situation, a designer can use multiple gear reductions in the same mechanism. This is called a compound gear reduction.
In a compound gear system, there are multiple gear pairs. Each pair has its own gear ratio, and a shared axle connects the pairs to each other. The resulting compound gear system still has a driving gear and a driven gear, and still has a gear reduction (now called a “compound gear reduction”). The compound gear ratio is calculated by multiplying the gear reductions of each of the individual gear pairs.
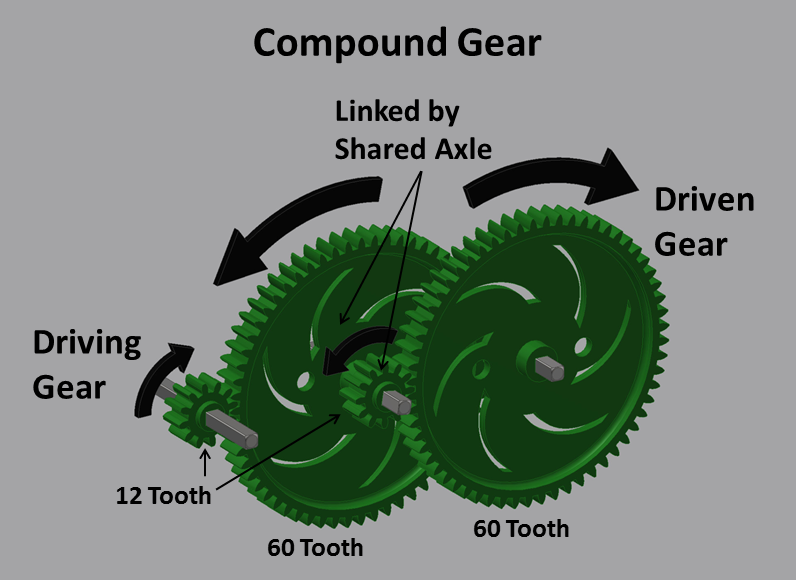
For the above example the overall gear reduction is calculated as follows:
Compound Gear Reduction = Reduction 1 x Reduction 2 = (60 / 12) x (60 / 12) = (5) x (5) = 25
That means the output shaft is 25 times slower than the input shaft with 25 times as much torque. Compound gear ratios add up quickly!
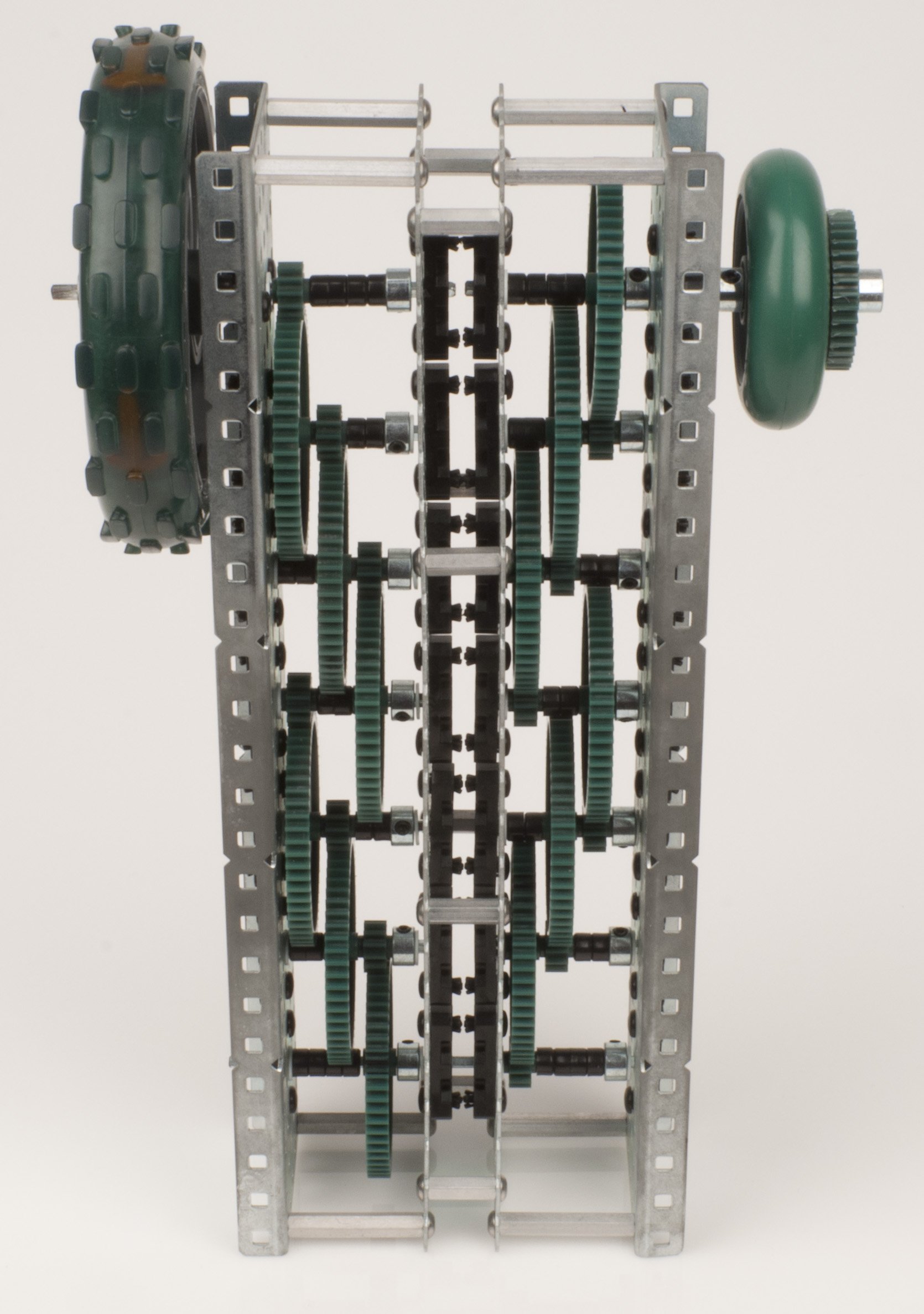
The above example is a gearbox with twelve 12:60 reductions as part of one compound reduction. This produces an overall reduction of 244,140,625, almost a quarter of a billion to 1. This means someone would need to spin the input 244,140,625 times just to get the output to spin once! Fun Fact: spinning the input once per second, it would take approximately 7 years and 9 months before the output spun once.