A degree of freedom refers to a something’s ability to move in a single independent direction of motion. To be able to move in multiple directions means to have multiple degrees of freedom. Moving up & down is one degree of freedom, moving right & left is another; something that can move up/down and left/right has TWO degrees of freedom. In the context of competition robotics, three basic degrees of freedom will be discussed.
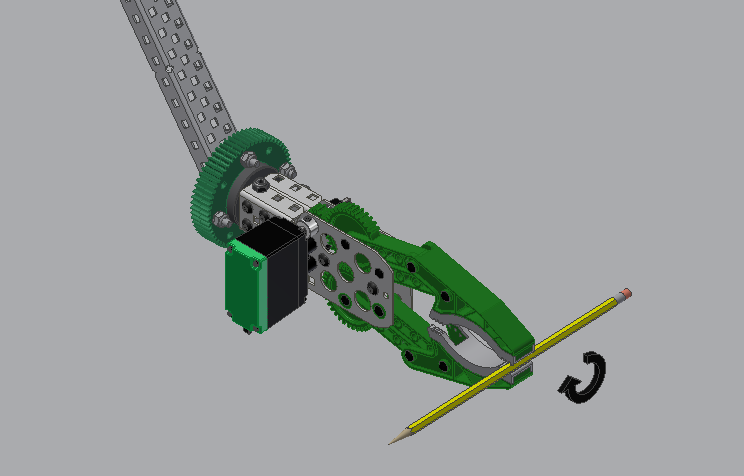
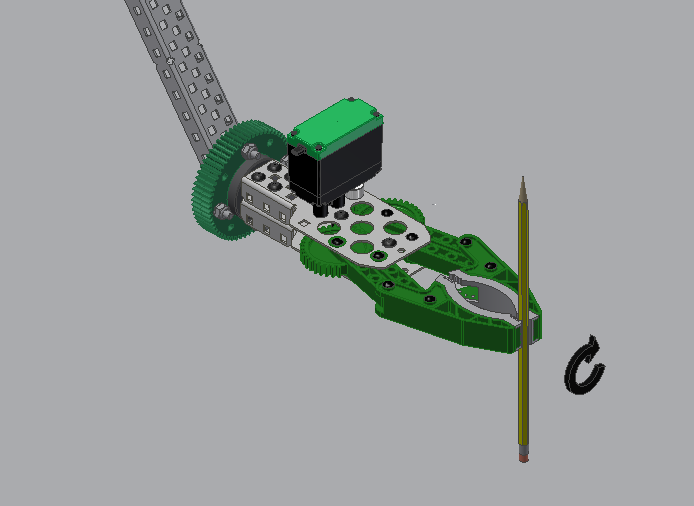
The first type of degree of freedom is one in which the robot’s arm can rotate about an axis parallel to the arm. This degree of freedom is found in the human wrist. One can imagine someone holding a pencil in his or her fist so it is parallel to the floor (horizontal). Now this same person twists his or her wrist such that the pencil is pointed straight up at the ceiling (vertical). This “twisting” is one degree of freedom.
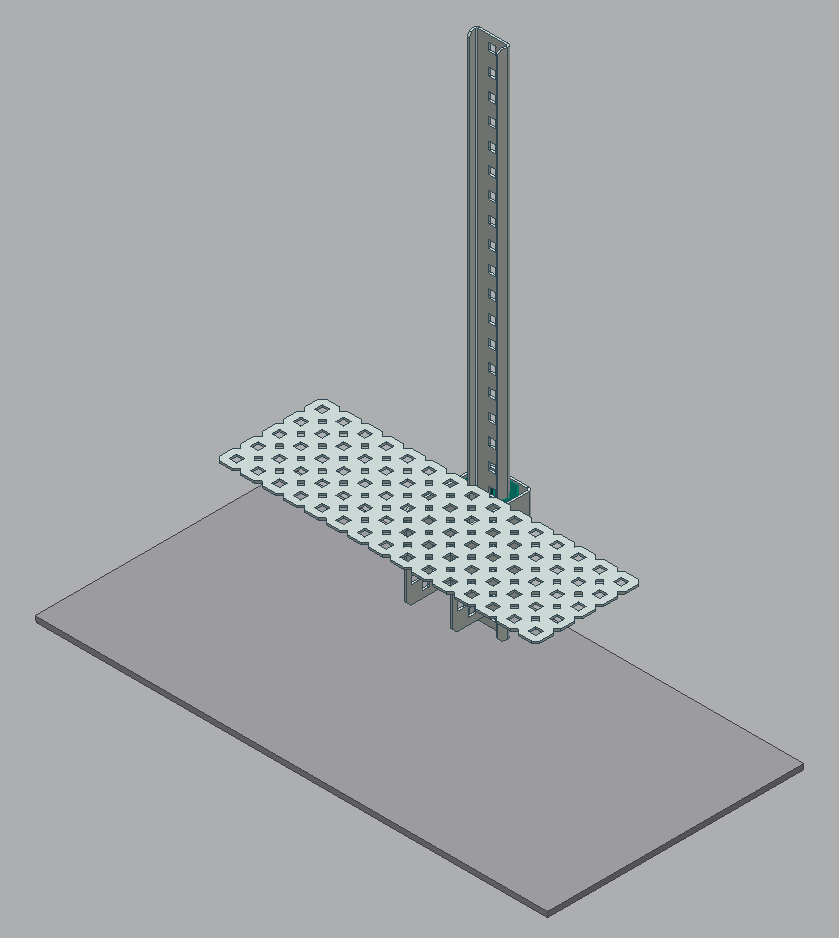
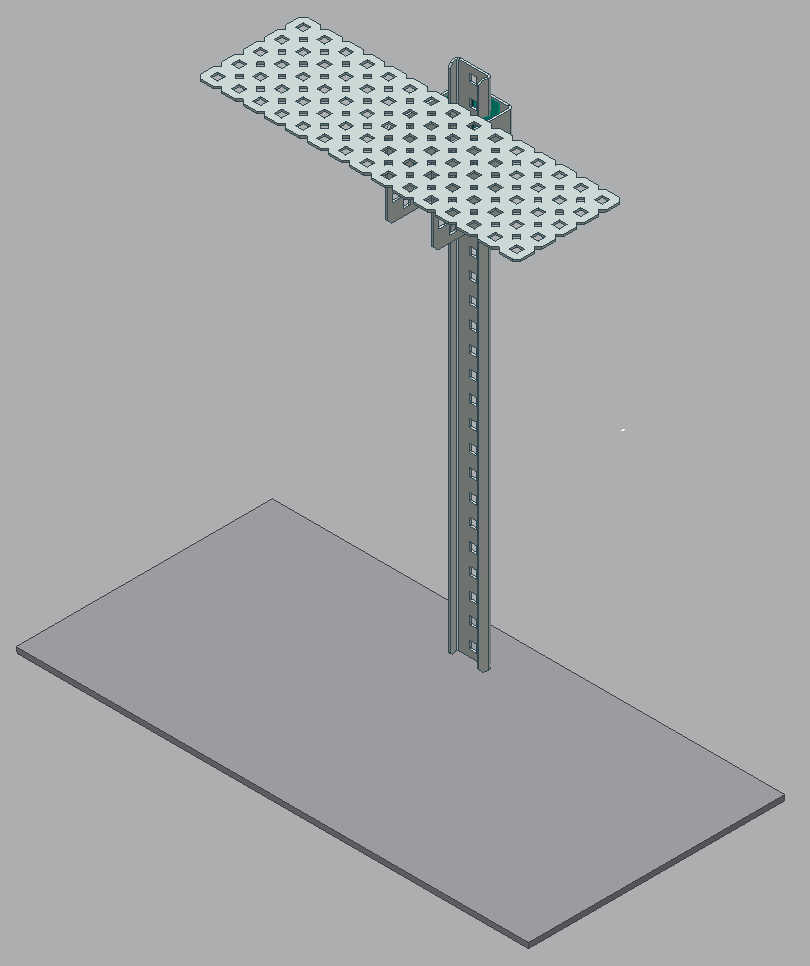
The second type of degree of freedom is linear movement. In this case, a component on a robot can slide in and out (or up and down, or left and right). An elevator represents this linear degree of freedom (moving up and down), as does a common desk drawer (moving in and out).

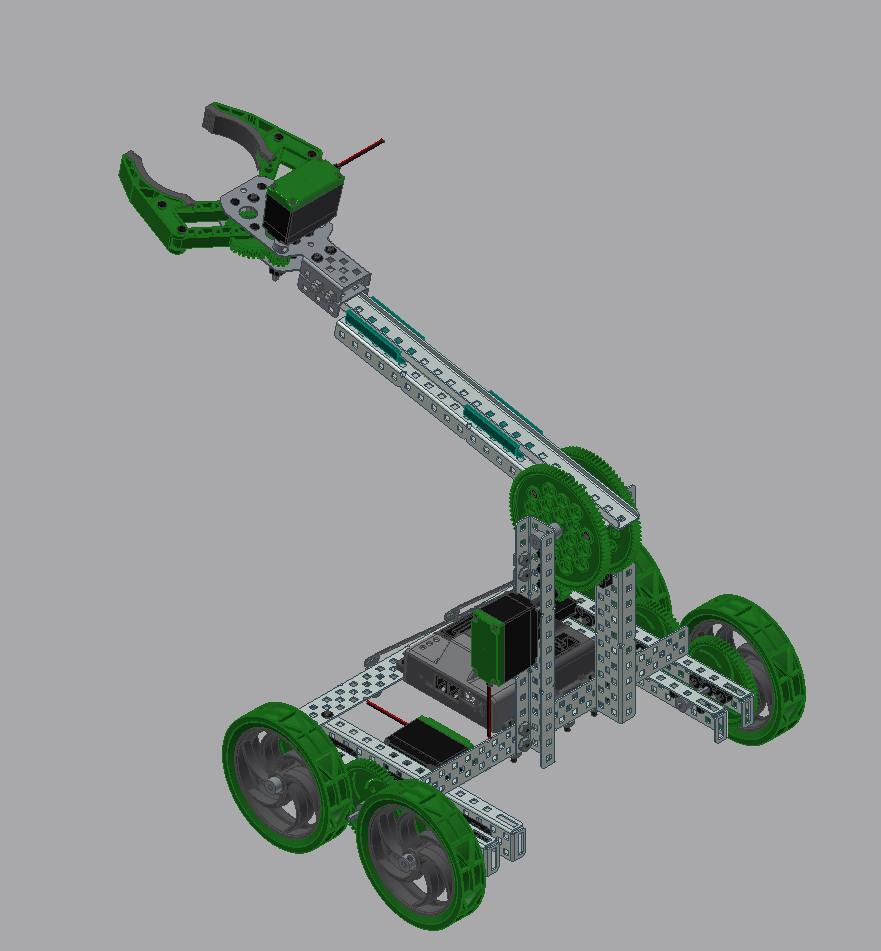
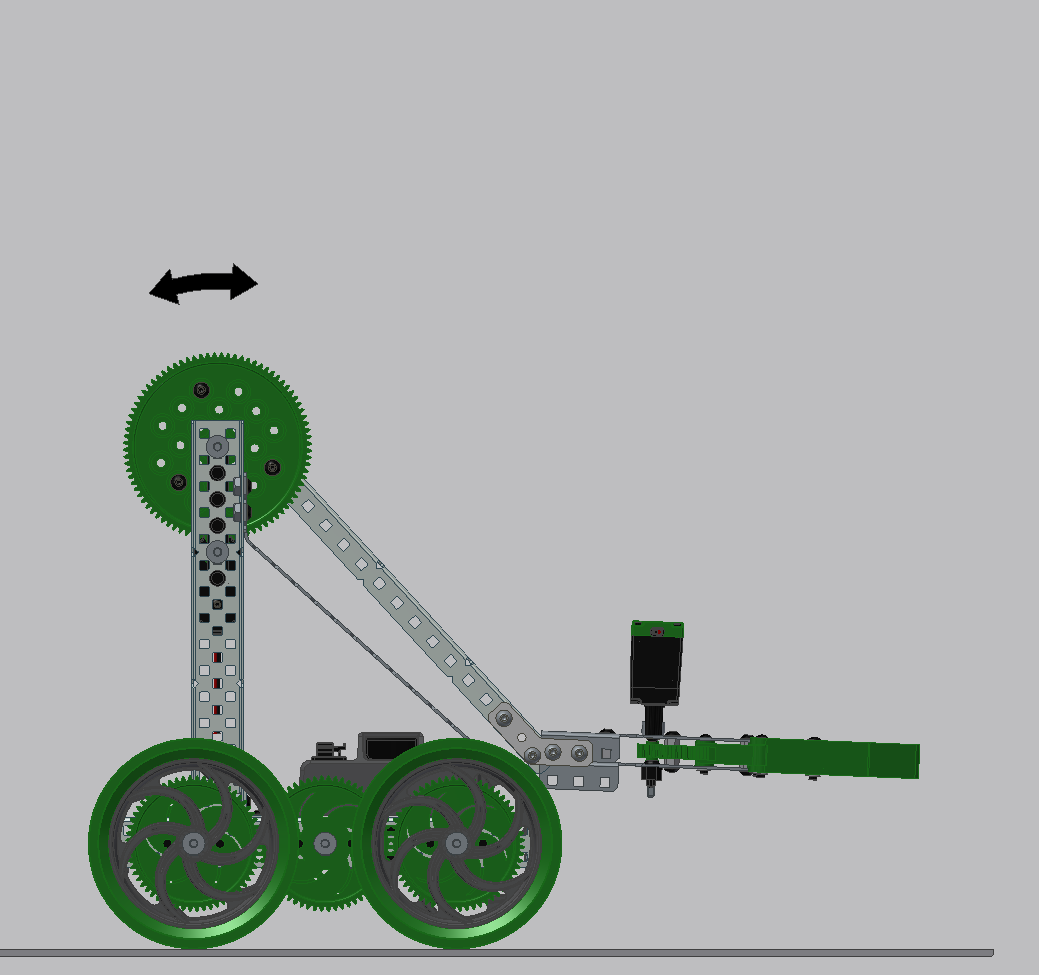
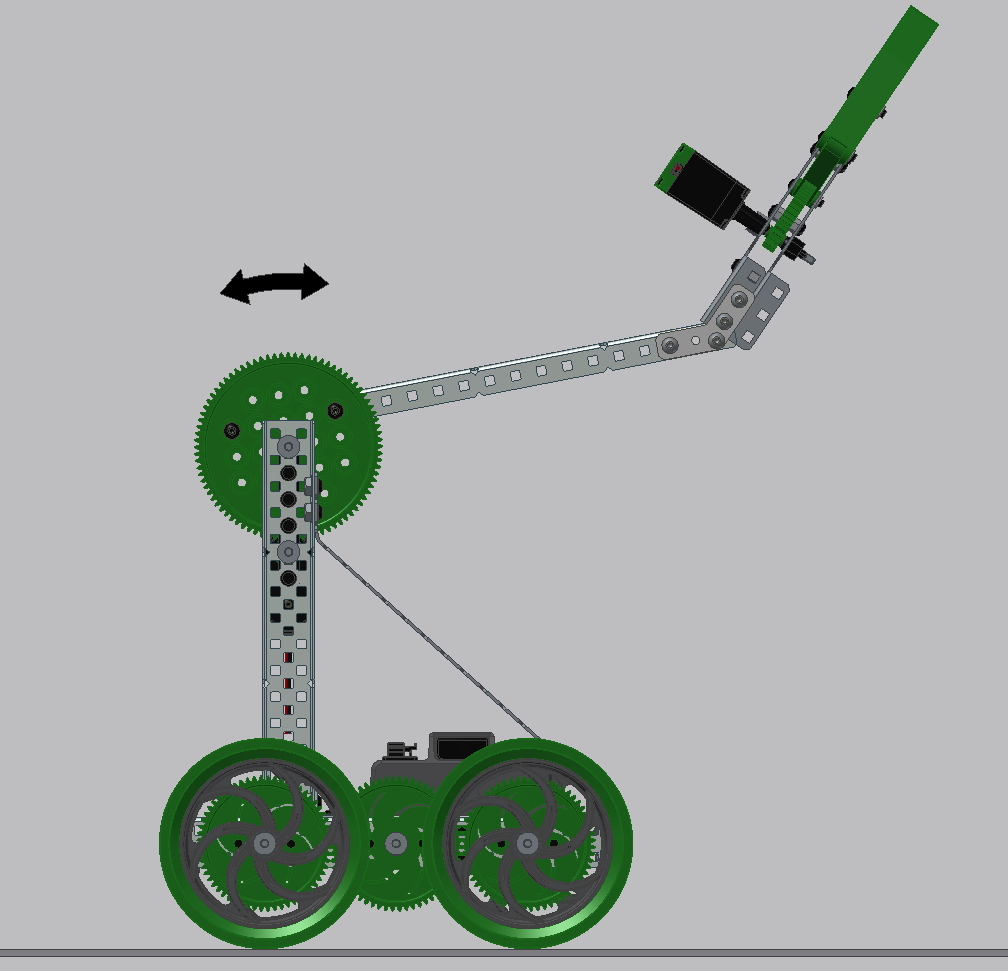
The third type of degree of freedom is one in which there is rotation about an axis perpendicular to an arm. The human elbow is an example of a joint with this degree of freedom. The arm-mass systems discussed in Unit 7 and Unit 8 are also examples of this degree of freedom.
Exercise: Students should try to determine how many degrees of freedom the human arm has. Hint: some of the joints have multiple degrees of freedom!
Competition robots typically only require a few degrees of freedom, since they don’t need to be as versatile or dexterous as a human arm. Best practices for competition robot lifting mechanism design will be discussed in more detail in this unit.