Gears aren’t the only mechanisms in competition robotics that provide gear reduction. The same principles apply to sprockets & chains and pulleys & belts.
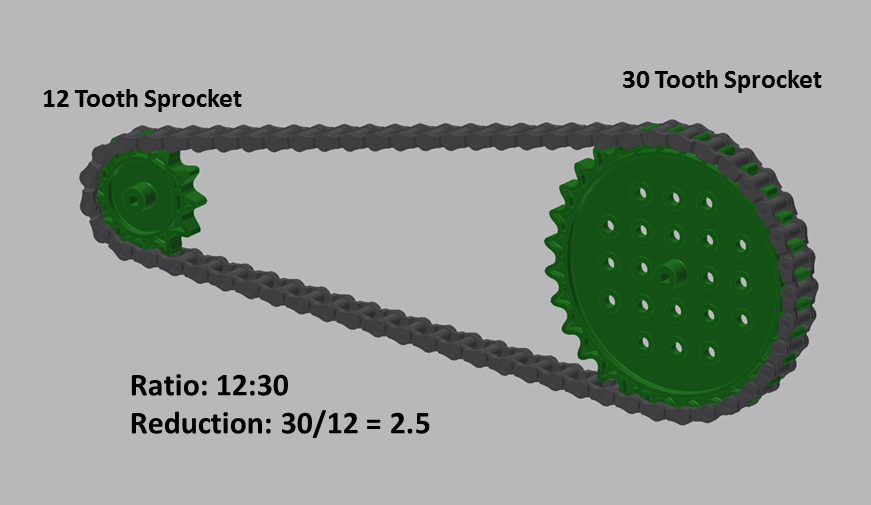
Similar to gears, sprocket ratios can be calculated by counting their teeth.
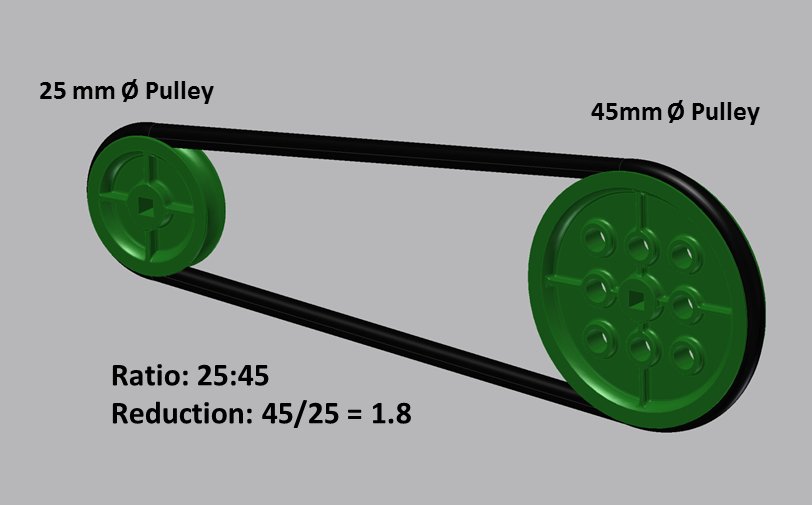
Pulleys and belts don’t have teeth, but their ratio can be calculated by comparing their diameters, as shown above.
Both of these mechanisms provide more options to designers working with mechanical power transmission. These two options work great in situations where torque needs to be transferred over long distances. Unlike gears, these systems do not reverse the direction of motion.