One “expert trick” used by many competition robotics teams is based on the concept of passive assistance. Passive assistance is when a designer adds something to the lifting mechanism to assist the actuator in lifting the load. Usually these take the form of counter-balances or springs. If the lifting mechanism is trying to lift a claw with a 1 Newton weight in it, and the designer adds in 1 N worth of spring force, the motor will only need to lift the weight of the claw! Using passive assistance can GREATLY reduce the load on the motors and allow for much faster mechanisms that lift much greater load. In certain situations, it may even be beneficial to use so much passive assistance that the motor must work to pull the lifting mechanism down.
Consider a robot that is lifting a ball which exerts a force on the end of an arm of 4 Newtons (for this example, one can assume the arm and claw weigh nothing). The designer could add 2 Newtons of passive assistance springs to the arm. This means when the arm is lifting up, the motor is exerting 2 Newtons and the spring is adding 2 Newtons to lift the 4 Newton ball. After dropping the ball into a goal, the motor would then need to fight against the springs to lower the arm, and would exert 2 Newtons of force.
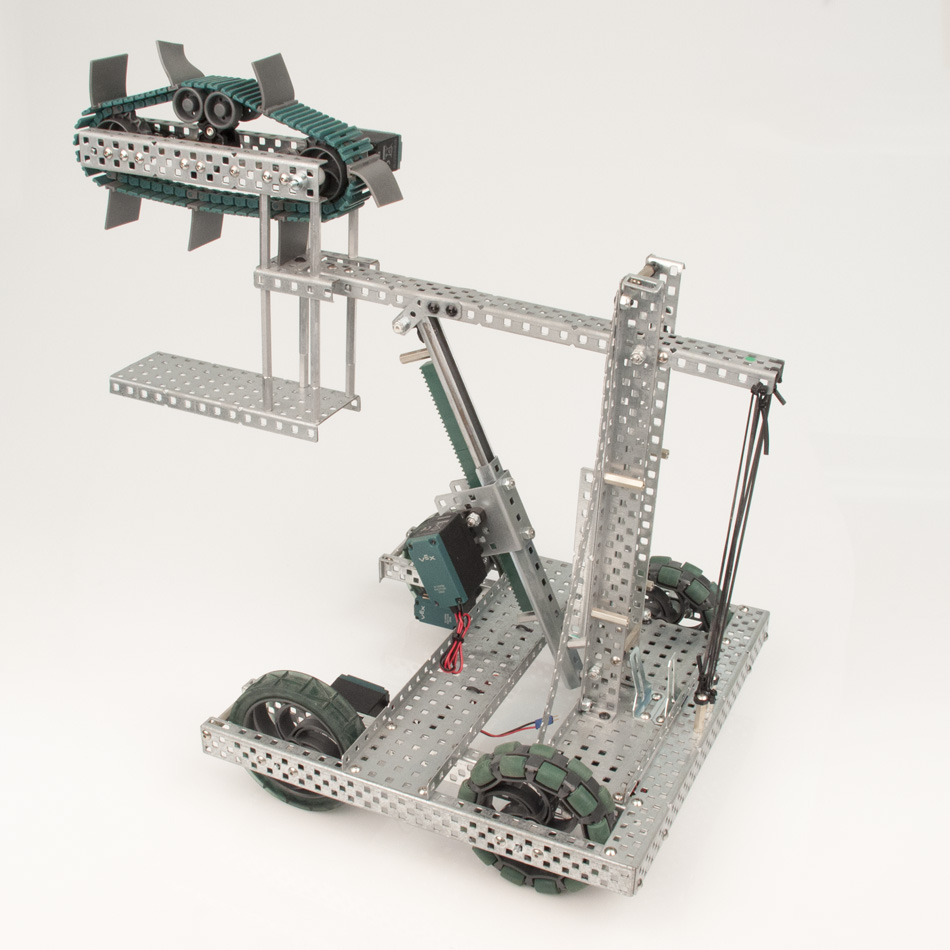
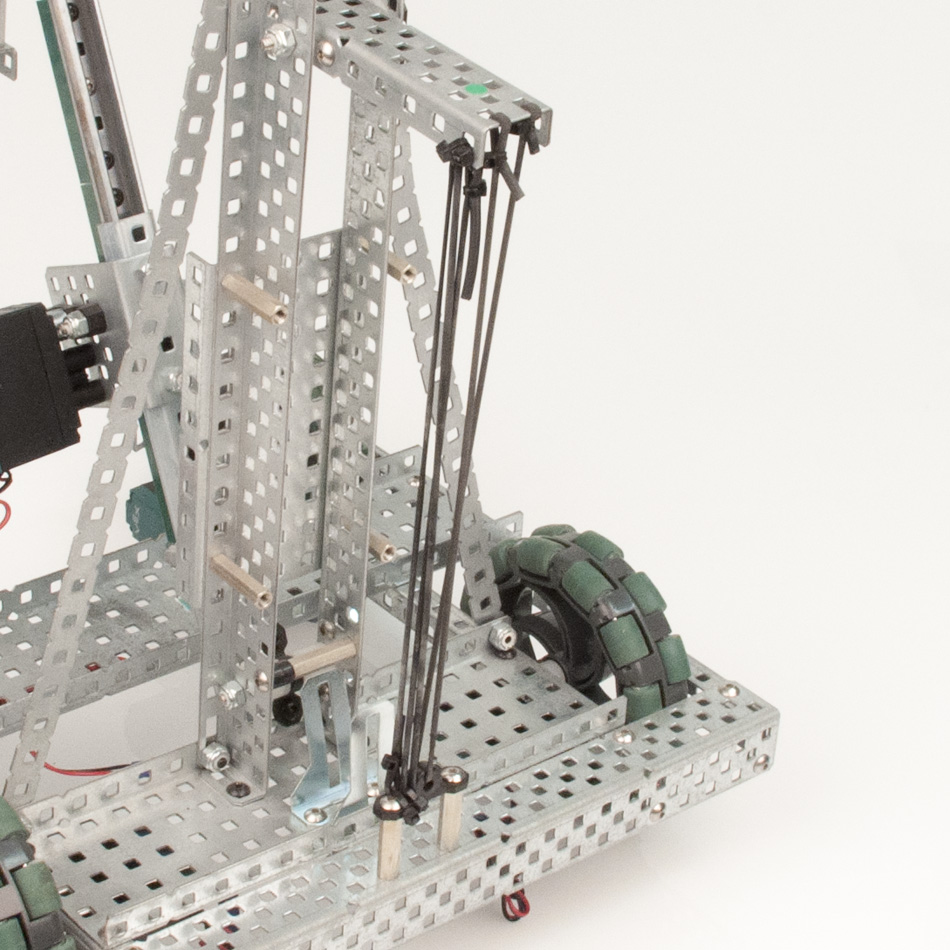
The most common kinds of passive assistance used in the construction of VEX Robots are elastic surgical tubing and rubber bands. These can be stretched in such a way that they contribute to the upward motion of a lifting mechanism.
There are tradeoffs involved in using passive sssistance, but clever designers can use it to reduce the load on their motors, and make their lifting mechanisms much quicker and more robust.